

External-skeleton upper-limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of medical robots, can solve the problems of inconvenient adjustment of the length of the upper arm and forearm, the inability to use both hands for rehabilitation training at the same time, and the user's inability to wear and use it on the go, so as to achieve shoulder position adjustment and locking function, improving rehabilitation efficiency, and compact and reasonable structural design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
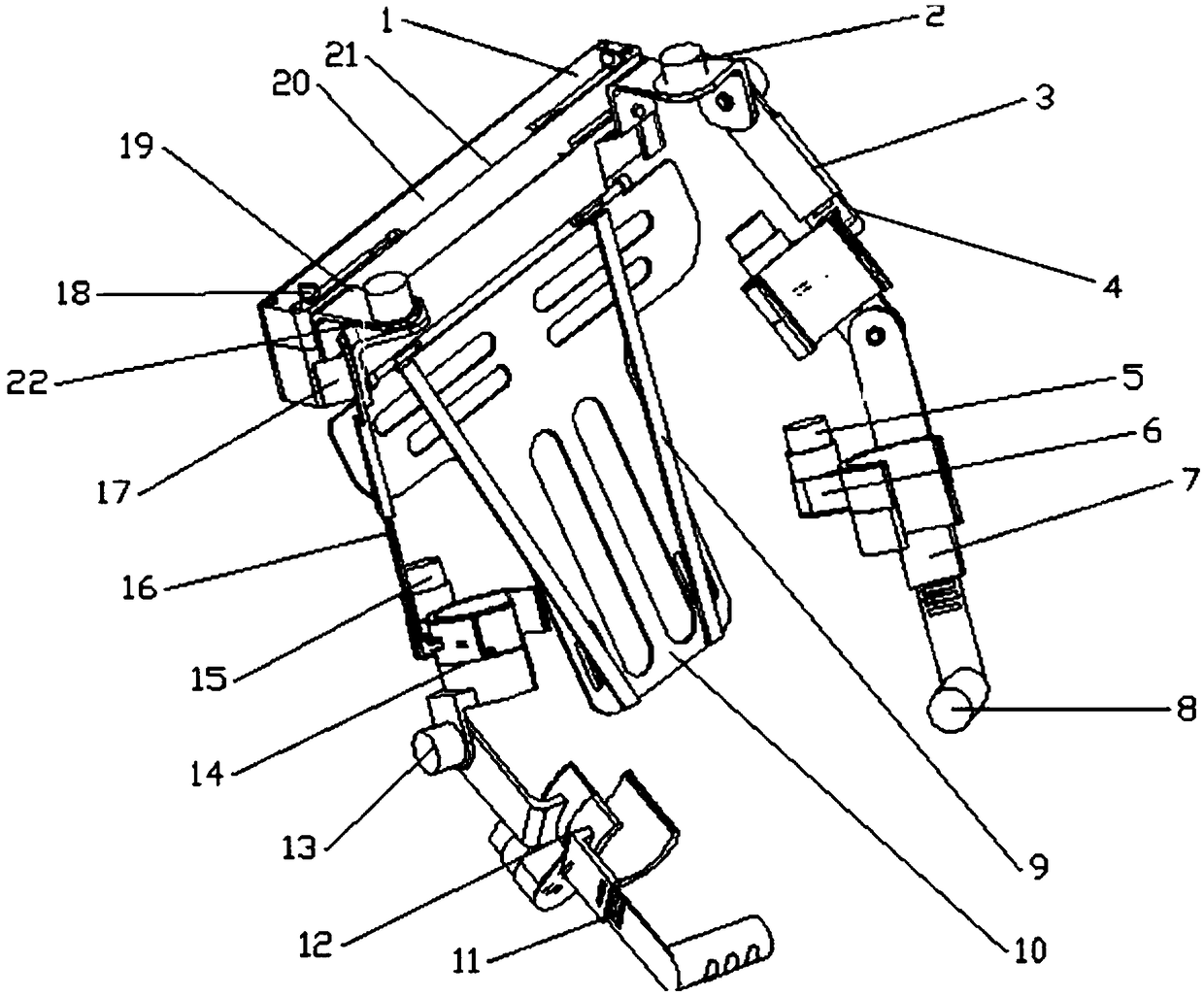
[0042] Such as figure 1 As shown, the exoskeleton upper limb rehabilitation robot of this embodiment includes: a back plate 10, a shoulder 1, an upper limb mechanical arm 3, the back plate 10 is hinged with the shoulder 1, and the upper limb mechanical arm 3 includes an upper arm mechanism 4 , The forearm mechanism 7 and the hand mechanism 8 and the drive mechanism; the upper limb manipulator 3 includes the upper limb left manipulator arm and the upper limb right manipulator arm that are identical in structure and symmetrically mounted on the shoulder 1; the shoulder 1 It includes a shoulder frame 20, a shoulder top plate 19, and a shoulder adjusting and fixing mechanism 18, the shoulder adjusting and fixing mechanism 18 is installed in the shoulder frame 20, and the shoulder top plate 19 is fixed to the shoulder adjusting and fixing mechanism 18 The upper arm mechanism 4 includes an upper arm top plate 22, an upper arm adjustment and fixing mechanism 16, an upper arm rotation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More