

Motor and pneumatic muscle hybrid wearable upper limb rehabilitation robot
A rehabilitation robot and pneumatic muscle technology, which is applied in the field of rehabilitation robots, can solve the problems of restricting patient rehabilitation, insignificant improvement effect, and high price, and achieves the effects of high bionics, beneficial to rehabilitation, and weight reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the rights of the present application. Based on the specific implementation of the present invention, other technical solutions obtained by persons of ordinary skill in the art without making creative efforts all belong to the protection scope of the present invention.
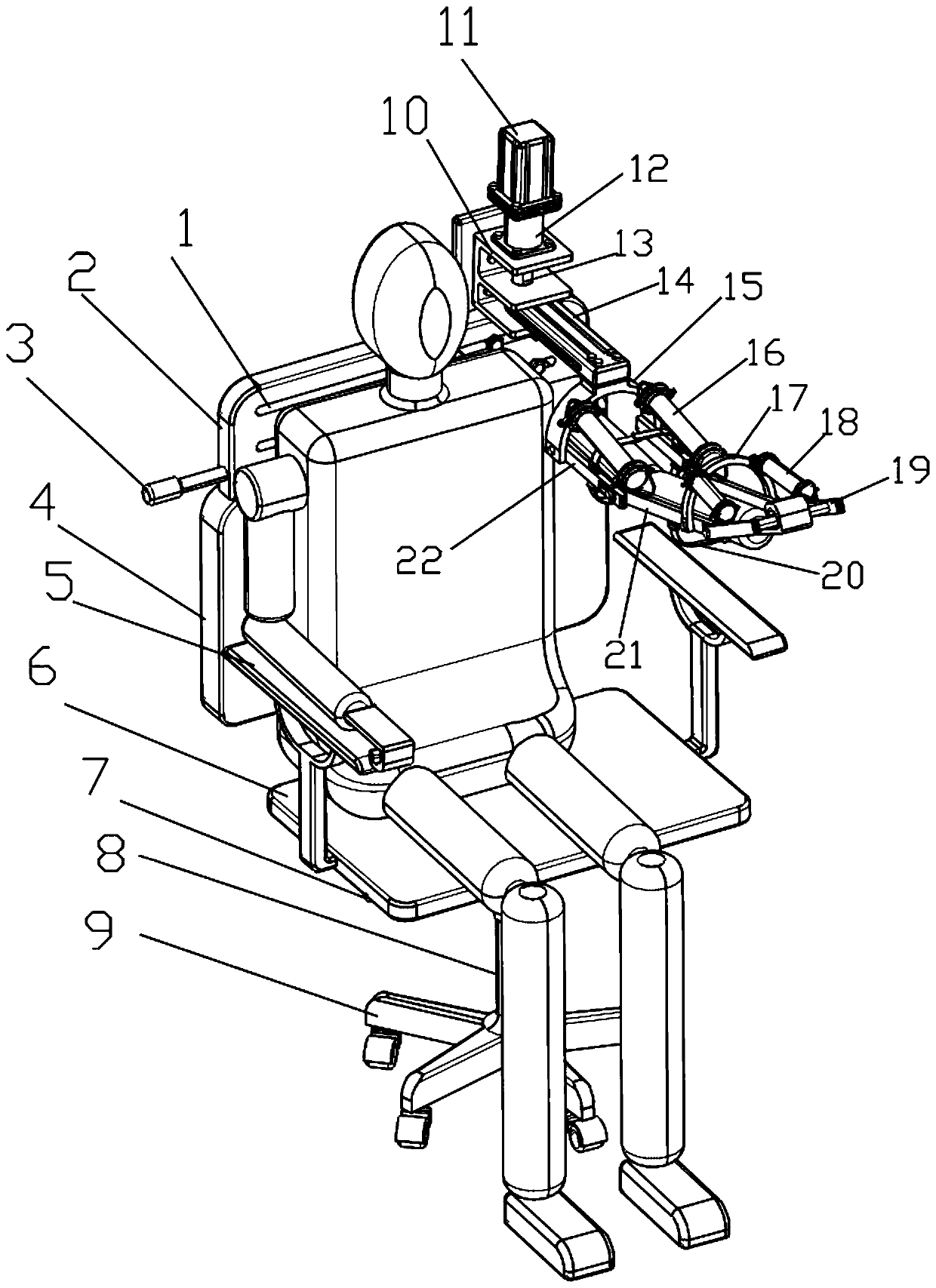
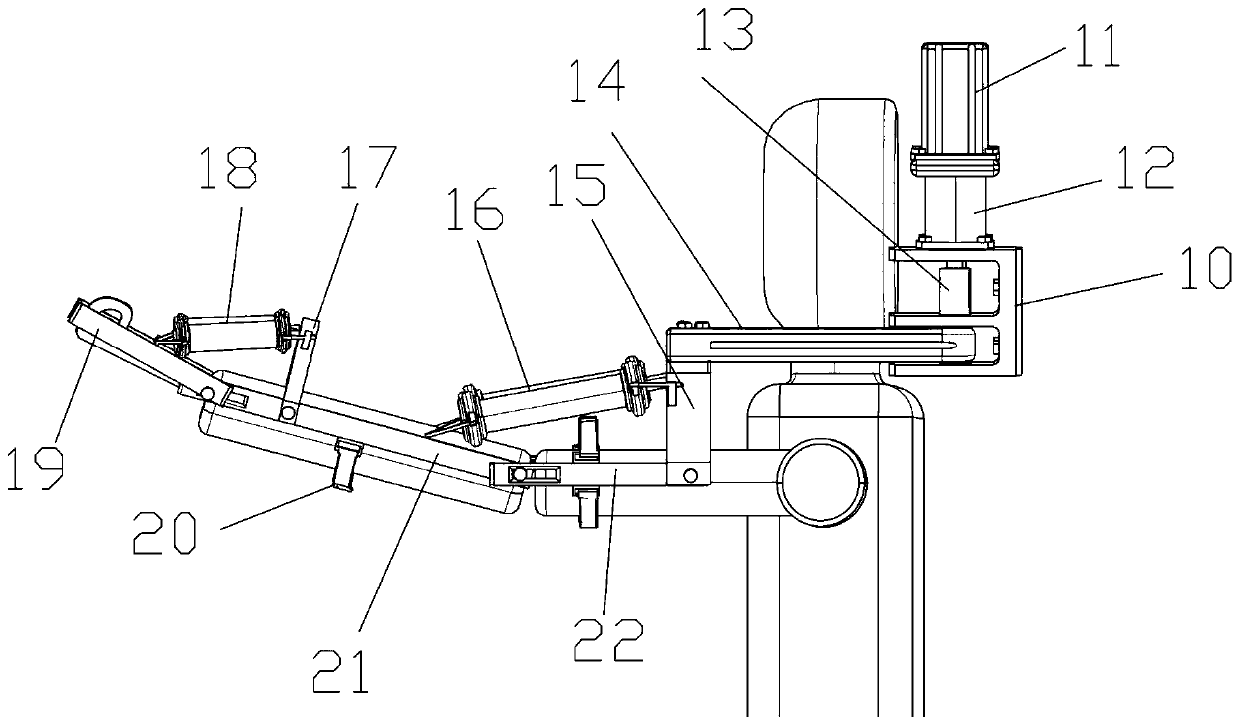
[0040] Figure 1 to Figure 9 , the present invention provides a wearable upper limb rehabilitation robot mixed with motors and pneumatic muscles, including a seat, a backboard, a shoulder motor fixing mechanism, a shoulder motor rotating mechanism, an upper arm fixing mechanism, an elbow joint flexion and extension mechanism, and a forearm fixing mechanism. mechanism, wrist flexion and extension mechanism, and hand fixing mechanism; the backboard is connected to the seat, the shoulder motor fixing mechanism is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More