

Autonomous obstacle avoidance method for unmanned boat integrating radar and photoelectric information
An unmanned boat, optoelectronic technology, applied in the reflection/re-radiation of radio waves, non-electric variable control, radio wave measurement system, etc. Safe, effective autonomous obstacle avoidance, and the effect of improving the degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
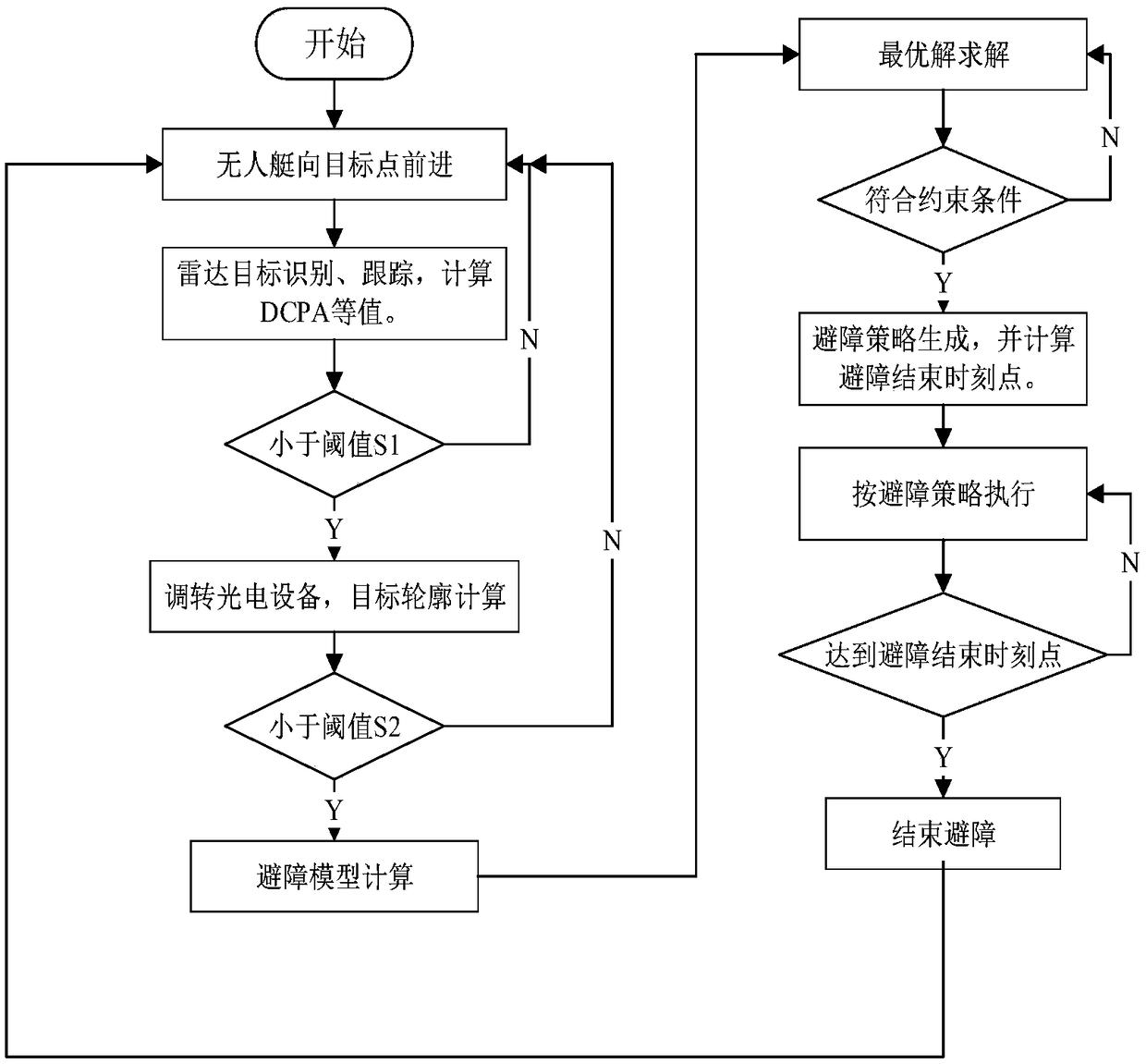
[0038] Such as figure 1 As shown, an autonomous obstacle avoidance method for unmanned boats that fuses radar and photoelectric information includes the following steps.
[0039]Step 1: Initial judgment of obstacle targets: The navigation radar on the unmanned boat is used to identify and track the obstacle targets entering its range, and the detection range is set to 500m. DCPA1 is calculated separately through radar echoes and auxiliary navigation information (including navigation information of GPS, compass and other equipment). Among them, DCPA1 represents the minimum encounter distance value between each obstacle target and the UAV. Then, compare and judge the DCPA1 value with the set threshold S1; wherein, the set threshold S1 is 5 to 10 times the length of the unmanned boat, preferably 50 m.
[0040] At the same ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More