

A walking and climbing robot along an overhead line
A technology of overhead lines and robots, which is applied in the direction of overhead lines/cable equipment, manipulators, manufacturing tools, etc., can solve the problems affecting the inspection efficiency of robots, the complex structure of the tension-resistant tower head, and the practical constraints of robots, so as to improve the obstacle-crossing Efficiency, light weight, short obstacle clearance time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
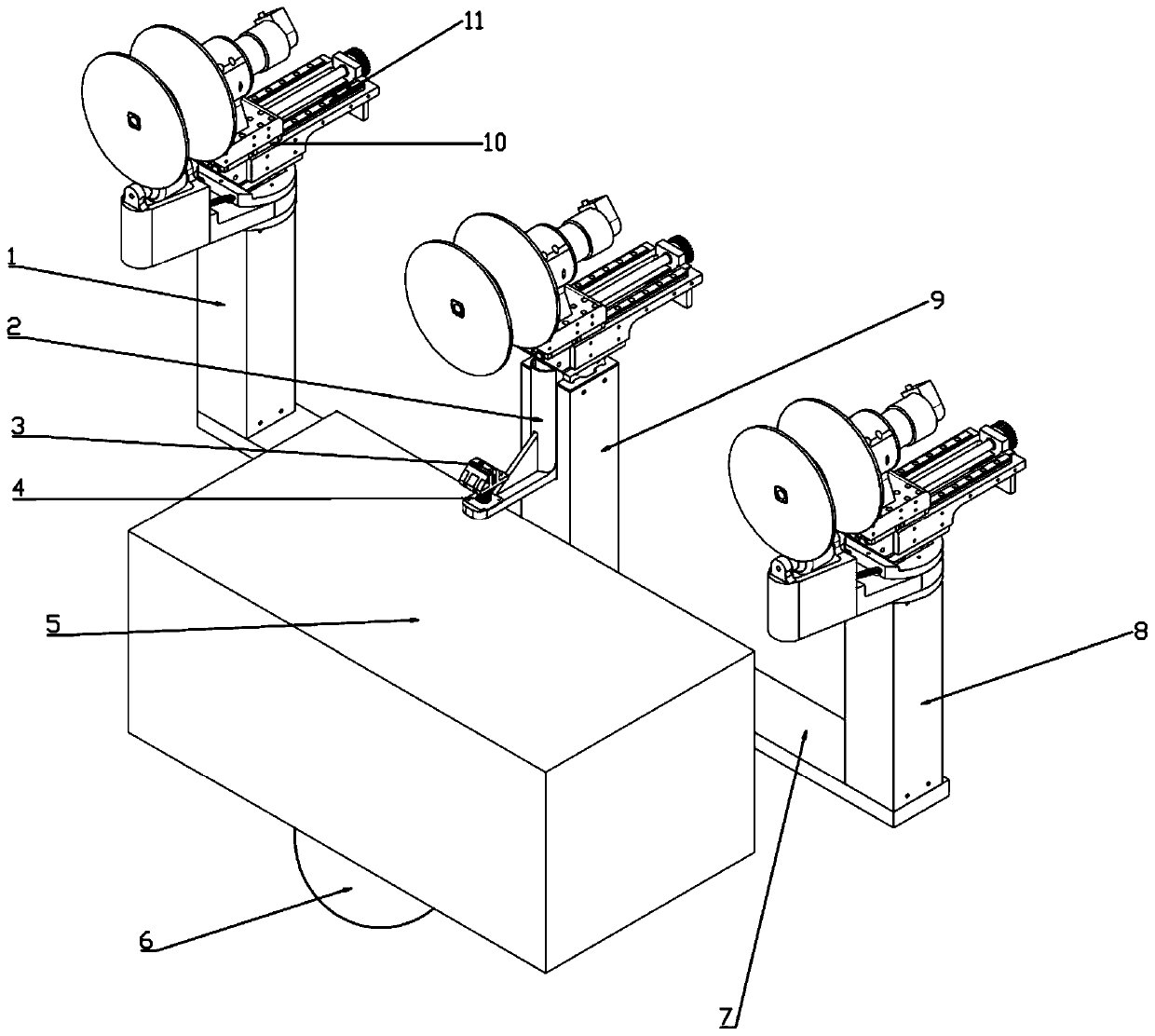
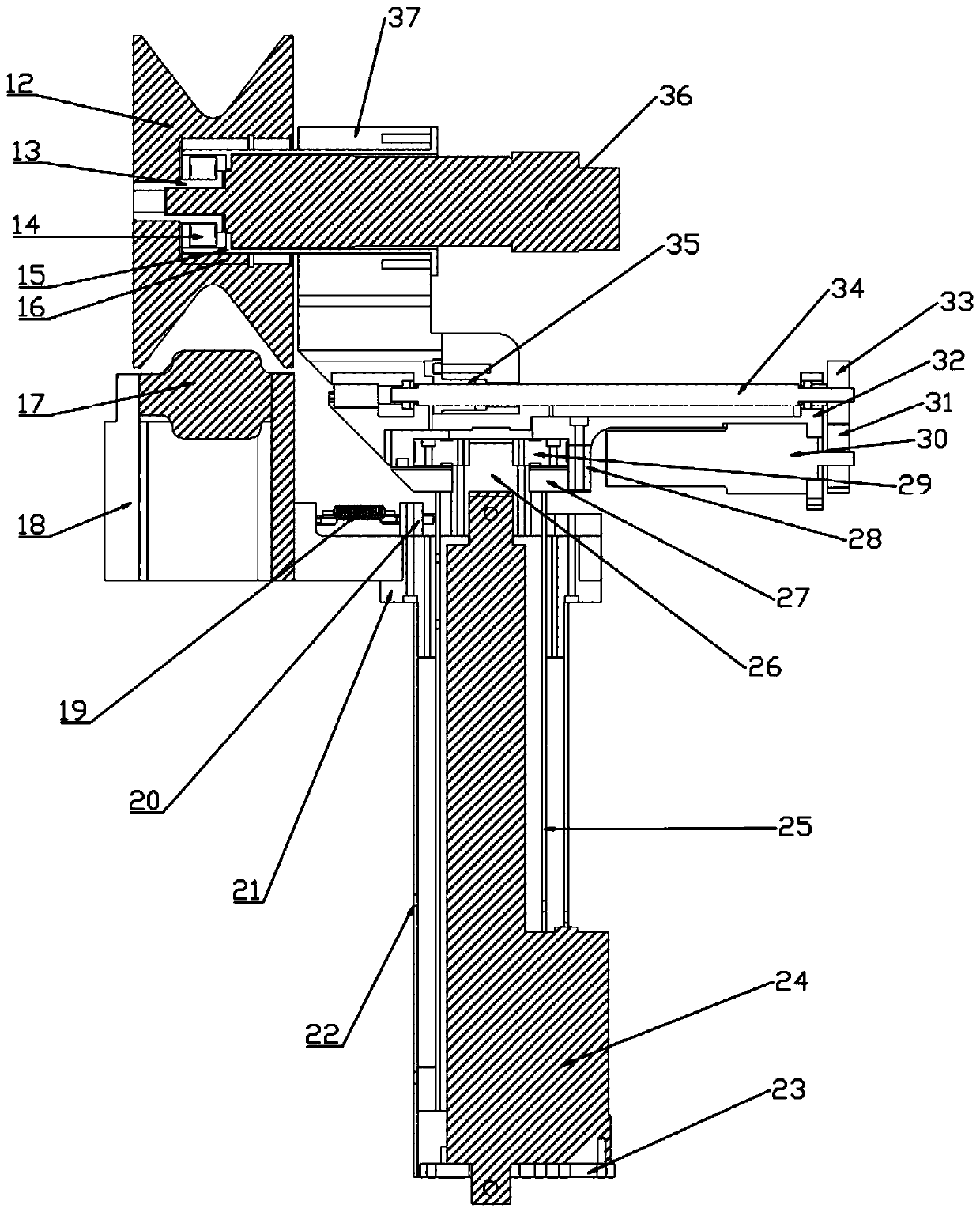
[0076] combine figure 1 and figure 2 As shown, a walking and climbing robot along an overhead line includes a support structure 5, a cantilever device base 7 and three cantilever devices. in:
[0077] The supporting structure 5 in this embodiment may adopt a box structure, for example.
[0078] A controller (not shown) is provided inside the support structure 5 for automatic control of other mechanisms.
[0079] In addition, inspection equipment 6 is also provided on the supporting structure 5 , including, for example, a camera, an infrared detector, and a wireless signal transceiver. Wherein, the camera and the infrared detector are respectively connected with the wireless signal transceiver through lines.
[0080] The wireless signal transceiver is connected to the base station control center on the ground through wireless signals.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More