

Cushion gasket quantitative grabbing and assembly robot system
A technology of robots and gaskets, which is applied in the field of parts assembly, can solve the problems of affecting the NVH effect of the engine, the stability of gaskets is not durable enough, and the quantitative picking error of gaskets, etc., and achieves simple structure, easy assembly, and firm grip Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the implementation scope of the present invention is not limited thereto.
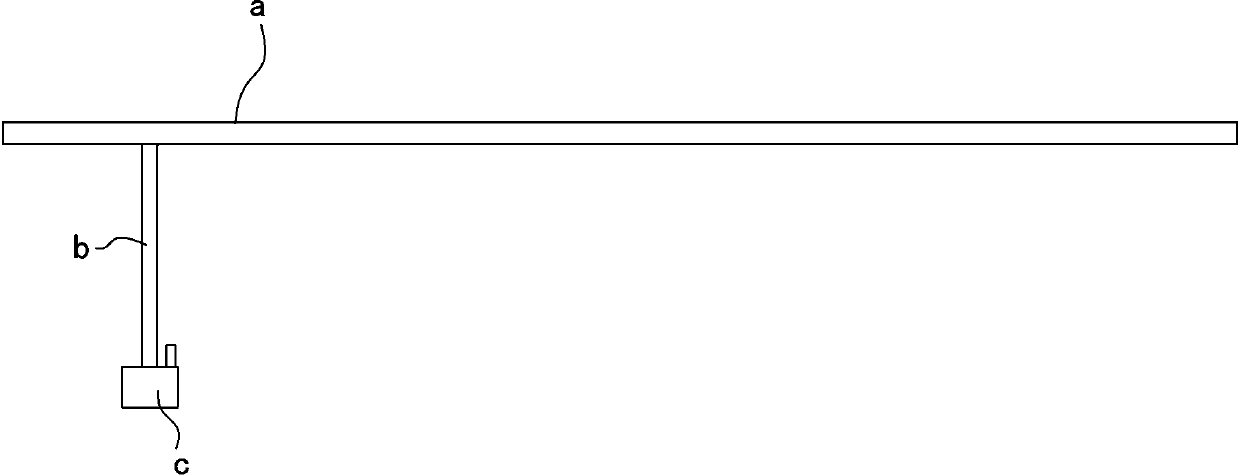
[0023] Such as Figure 1 to Figure 10 As shown, a buffer type gasket quantitative grabbing and assembly robot system described in this embodiment includes a main cross arm a, and the main cross arm is provided with a vertical arm b that can move along the main cross arm , The free end of the vertical arm is equipped with a manipulator c.
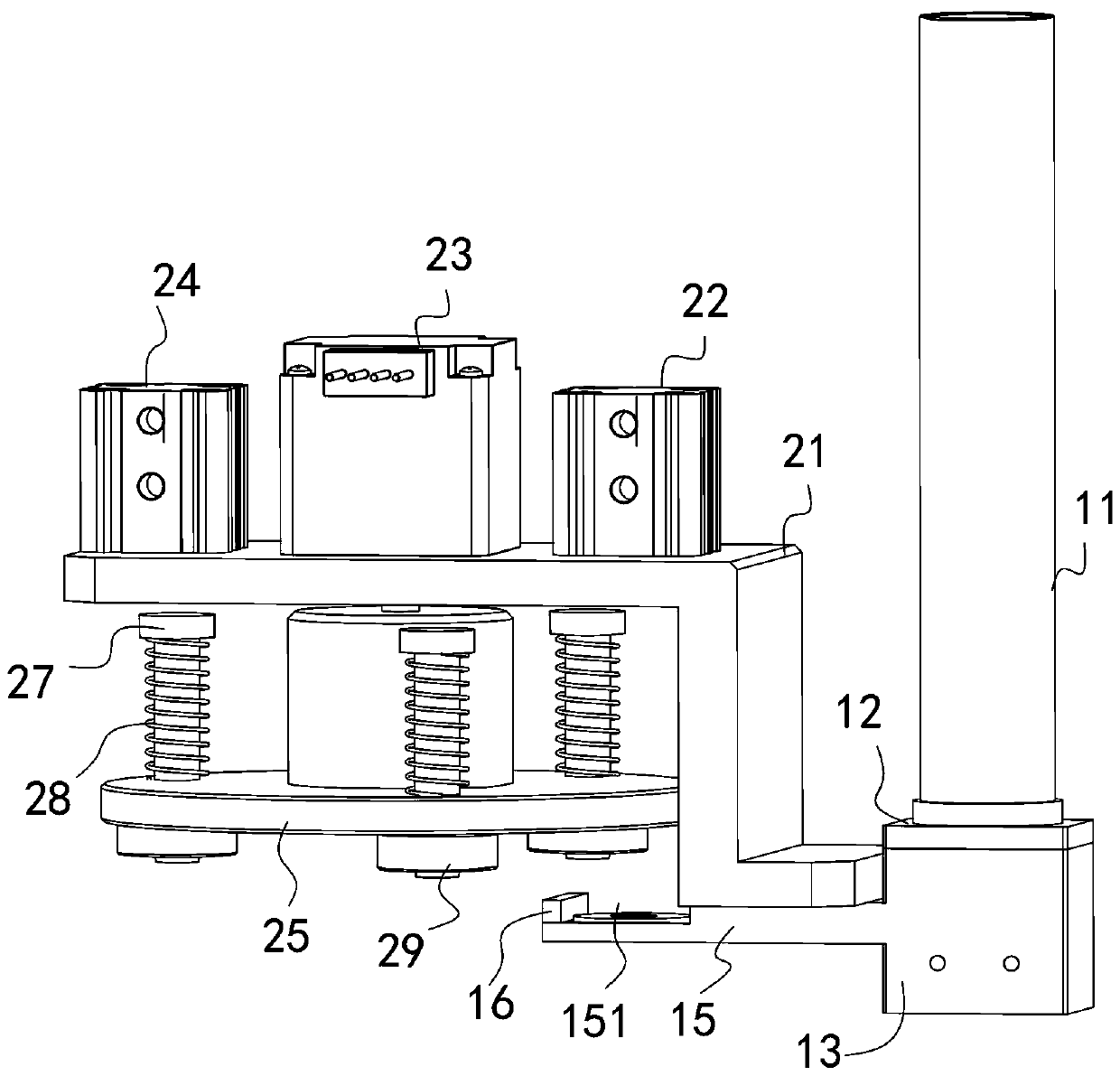
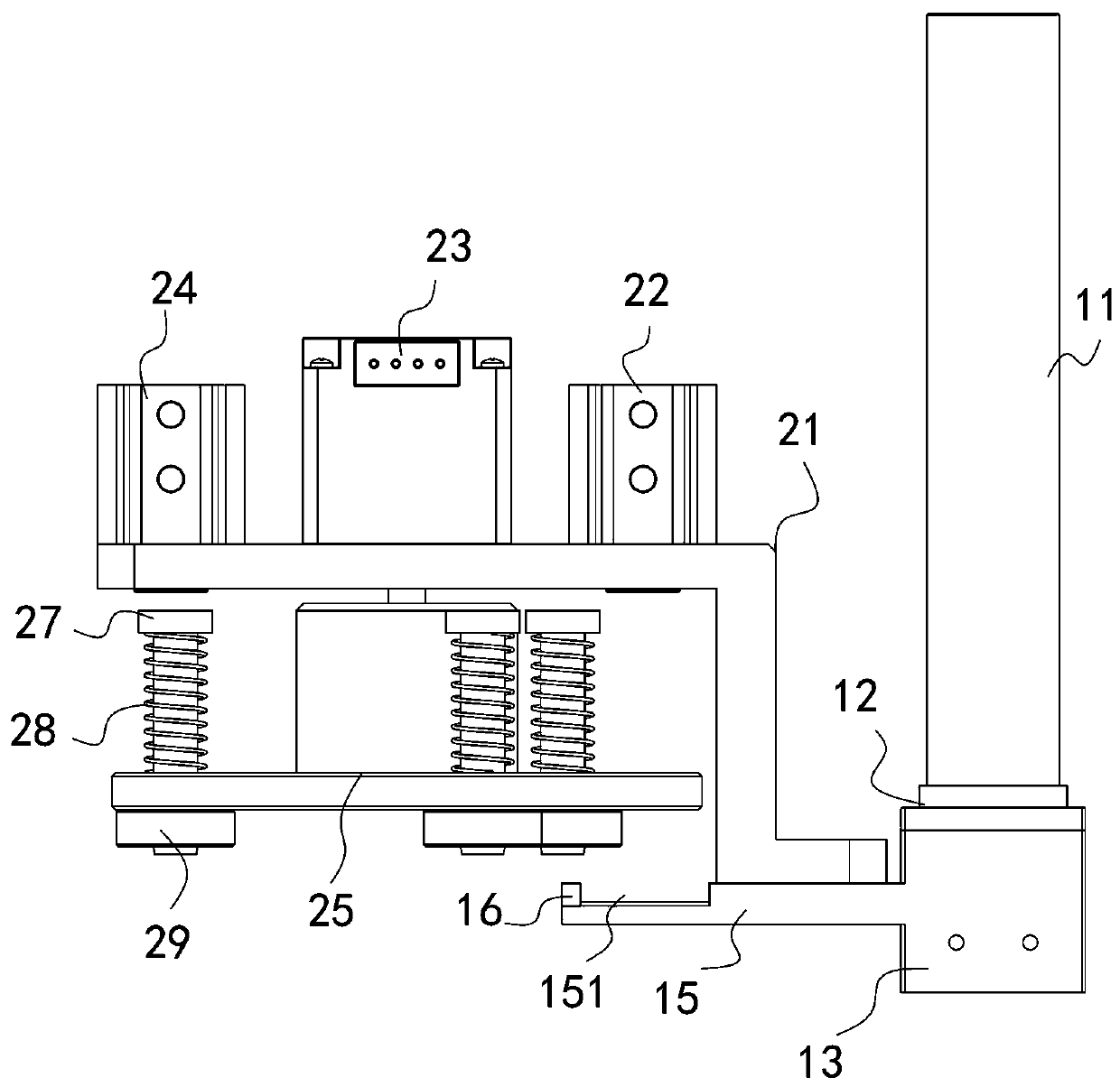
[0024] Described manipulator comprises gasket feeding device, and described gasket feeding device comprises gasket barrel 11, barrel fixing plate 12 and feeding frame 13, and described barrel fixing plate 12 is arranged on the upper end of described feeding frame 13, so One end of the gasket barrel 11 is fixed on the barrel fixing plate 12 and extends into the feeding frame 13. Two rubber rollers 14 are pivotally connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More