

Multi-degree-of-freedom self-adaptive exoskeleton for knee joint rehabilitation training
A rehabilitation training and self-adaptive technology, applied in manipulators, passive exercise equipment, program-controlled manipulators, etc., can solve the problems of secondary injury to the wearer and discomfort of the wearer.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example 1
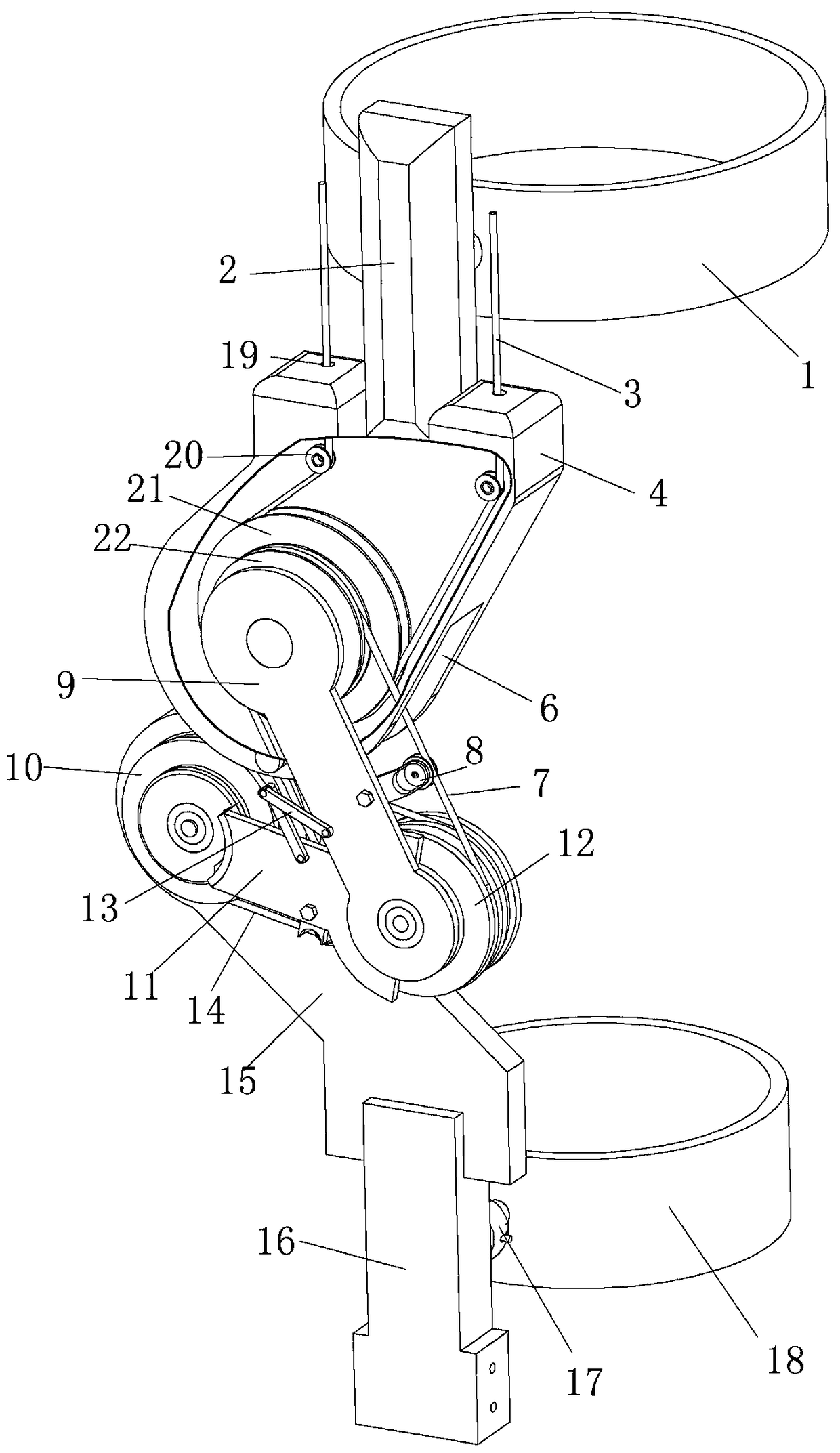
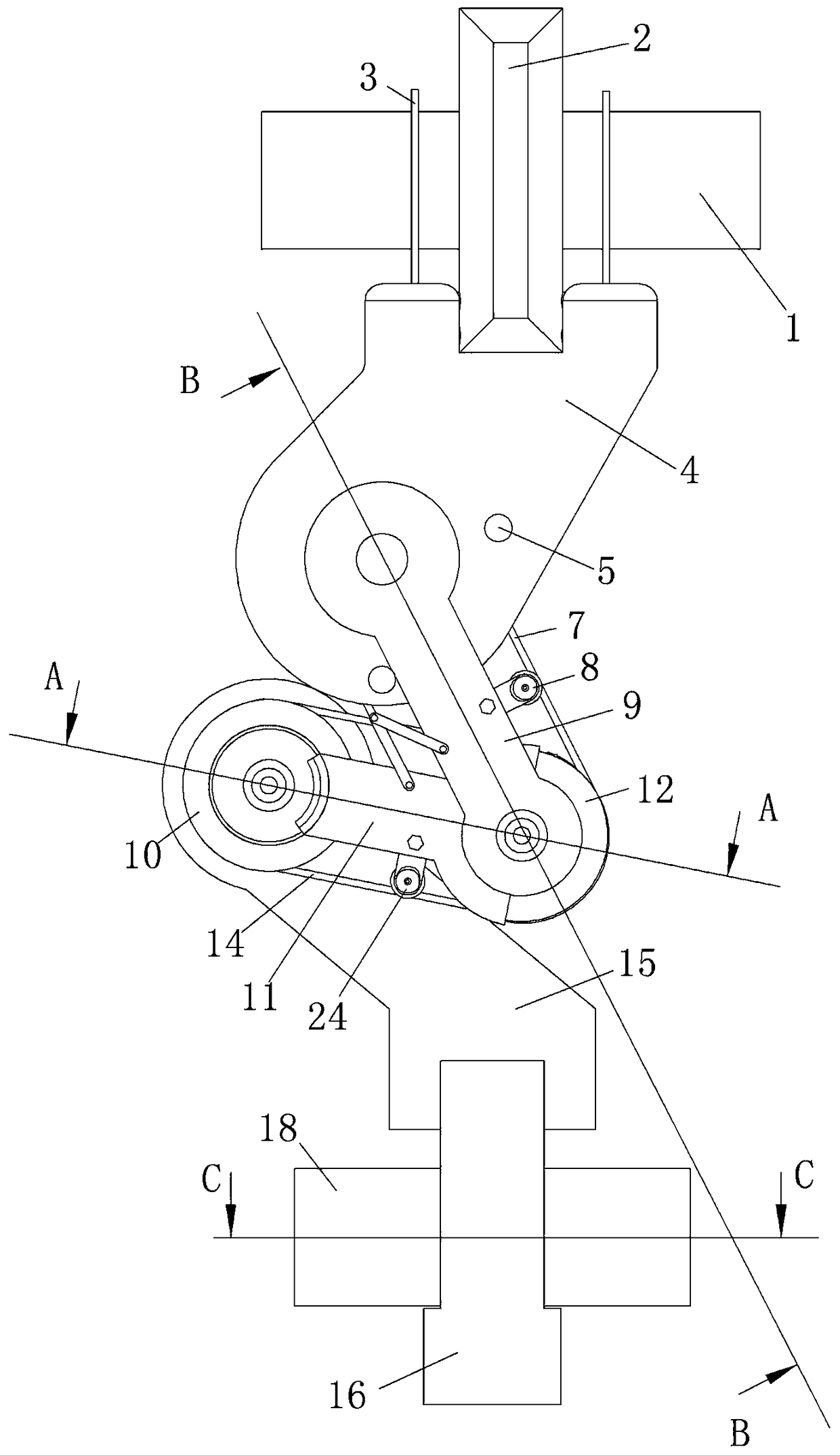
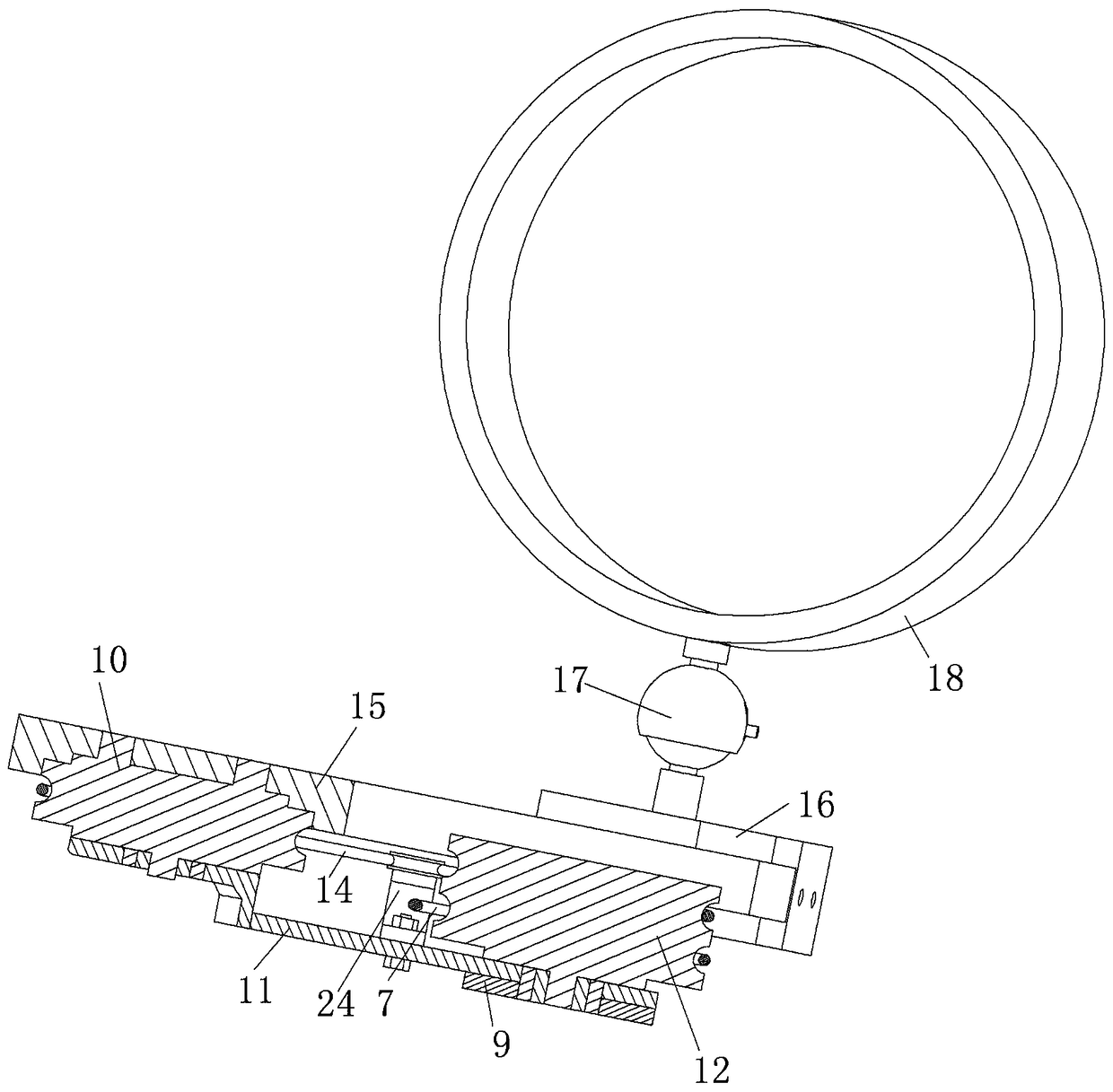
[0021] Implementation Case 1, see Figure 1-8 , a multi-degree-of-freedom adaptive knee rehabilitation training exoskeleton, the exoskeleton includes a thigh strap, a fixed shell, an adaptive follower, a calf drive plate and a calf strap,
[0022] The self-adaptive follow-up device includes a driving pulley, a synchronous pulley, a transition pulley, a driven pulley, an upper connecting plate and a lower connecting plate, and the fixed shell is a hollow body with a certain thickness, and the fixed shell The upper end of the upper end is in the shape of a concave character, and a belt passing groove is arranged on the lower side, and a vertically upward fixing column is fixed on the concave part of the upper end, and a horizontal connecting body is vertically fixed on one side of the fixing column. A thigh strap is fixed horizontally on the end, and the driving pulley and the synchronous pulley are coaxially fixed together and fixed in the cavity of the fixed shell through the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More