

Intelligent automobile path tracking hybrid control method
A path tracking and hybrid control technology, which is applied in the field of intelligent vehicle path tracking hybrid control and intelligent vehicle lateral control, can solve the problems that the reliability requirements of intelligent vehicle path tracking cannot be met, the controller design is complex, and the amount of calculation is large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Describe the implementation process of the present invention in detail below in conjunction with technical scheme and accompanying drawing:
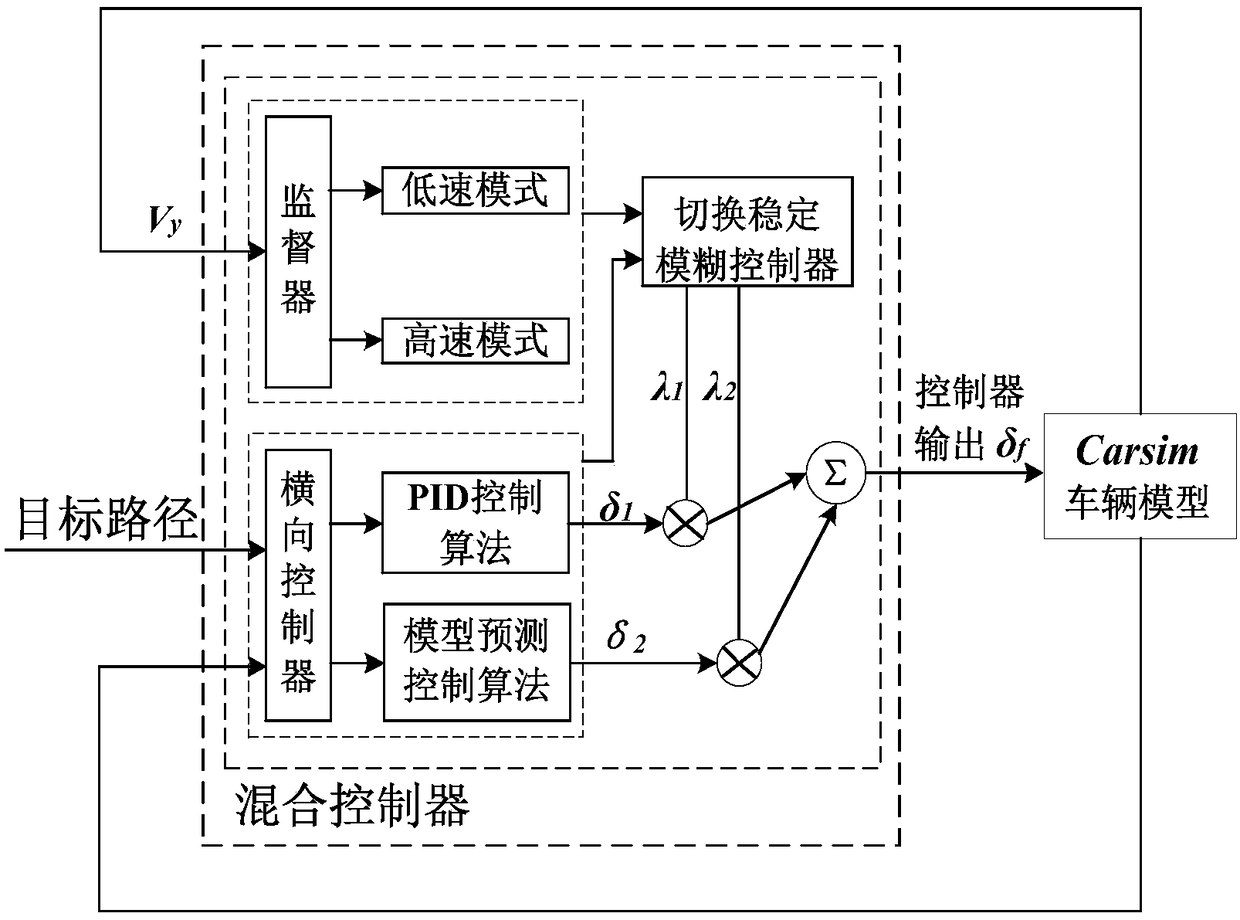
[0074] The present invention combines the differences in system characteristics presented by smart cars under low-speed and high-speed steering conditions, and first establishes the vehicle lateral control preview kinematics model at low speed and the vehicle lateral control dynamics model at high speed, and then based on the established power Learning model, design control strategy, and use PID control in low-speed mode, and model predictive control in high-speed mode, the supervisor determines the path following control mode through the vehicle speed, and then designs a switching stable fuzzy controller with stable supervision, The smooth switching of the lateral control system is realized, and finally the path tracking hybrid control of the intelligent vehicle is realized. The block diagram of the hybrid control system is as fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More