Real-time monitoring method based on multi-sensor fusion and used for action of fire-fighting robot
A multi-sensor fusion and fire-fighting robot technology, which is applied in fire rescue and other fields, can solve the problems that the target ignition point is not easy to identify, the robot action control is not clear, and the task cannot be completed effectively, so as to achieve real-time monitoring of operating conditions and simple and accurate control , the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0016] The technical scheme that the present invention solves the problems of the technologies described above is:
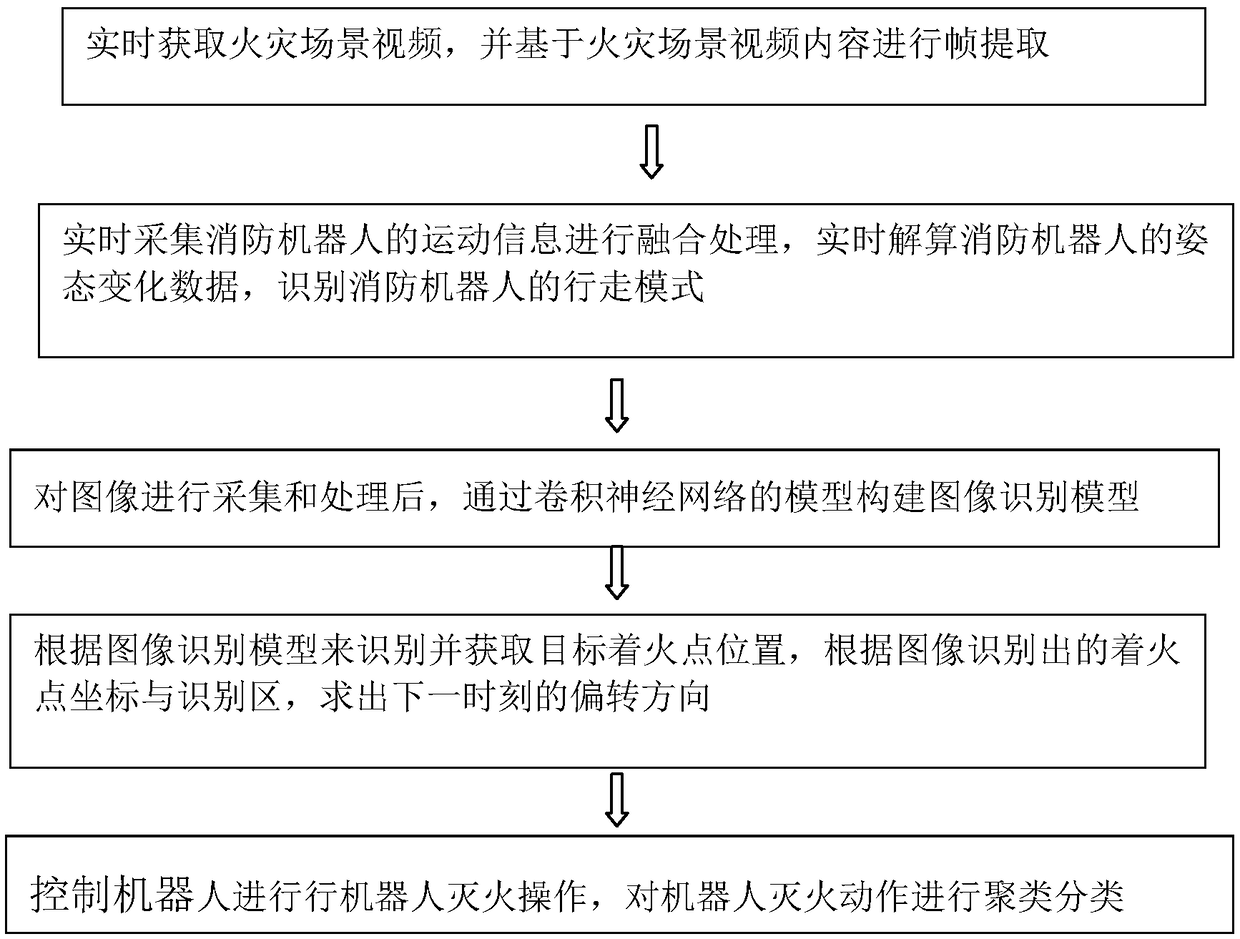
[0017] Such as figure 1 Shown, a kind of real-time monitoring method of fire-fighting robot action based on multi-sensor fusion, it comprises the following steps:
[0018] The fire scene video is obtained in real time through the camera installed on the fire fighting robot, and the motion information of the fire fighting robot is collected in real time through the angular rate sensor and gravity sensor installed on the fire fighting robot for fusion processing, and the posture change data of the fire fighting robot is calculated in real time, and Frame extraction is performed based on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com