Triphibian rotor wing robot and working method thereof
A three-dimensional, robotic technology, applied in the field of robotics, to achieve the effect of simple mechanism, efficient control, and reasonable layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
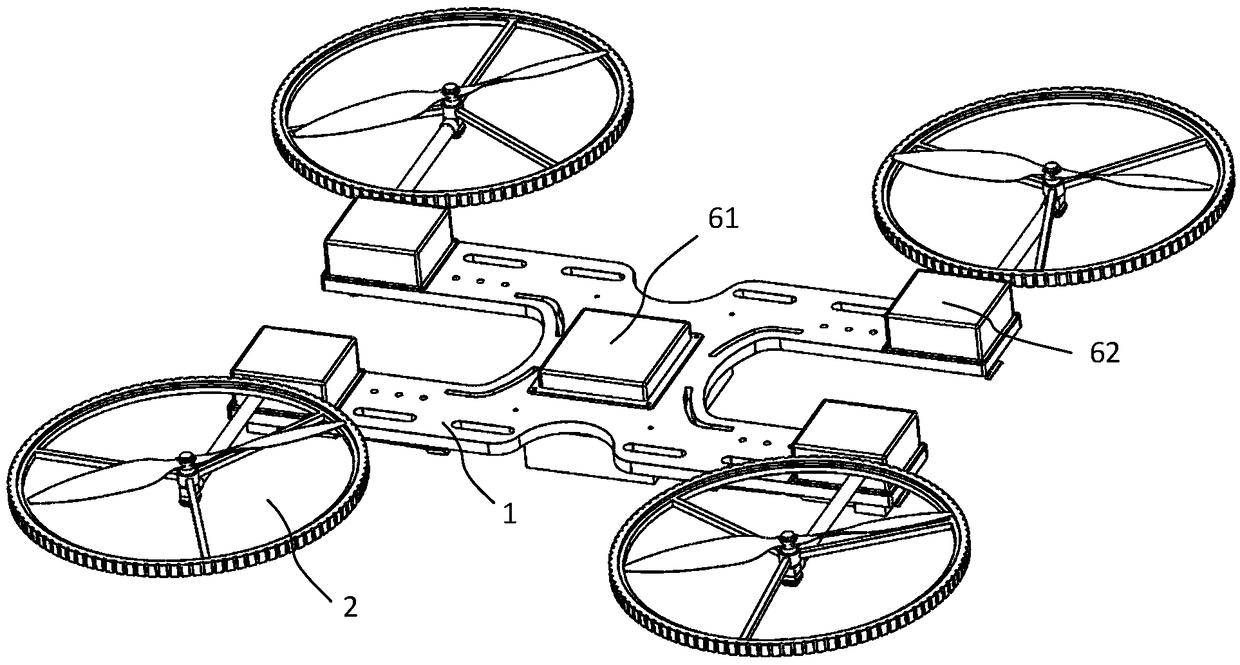
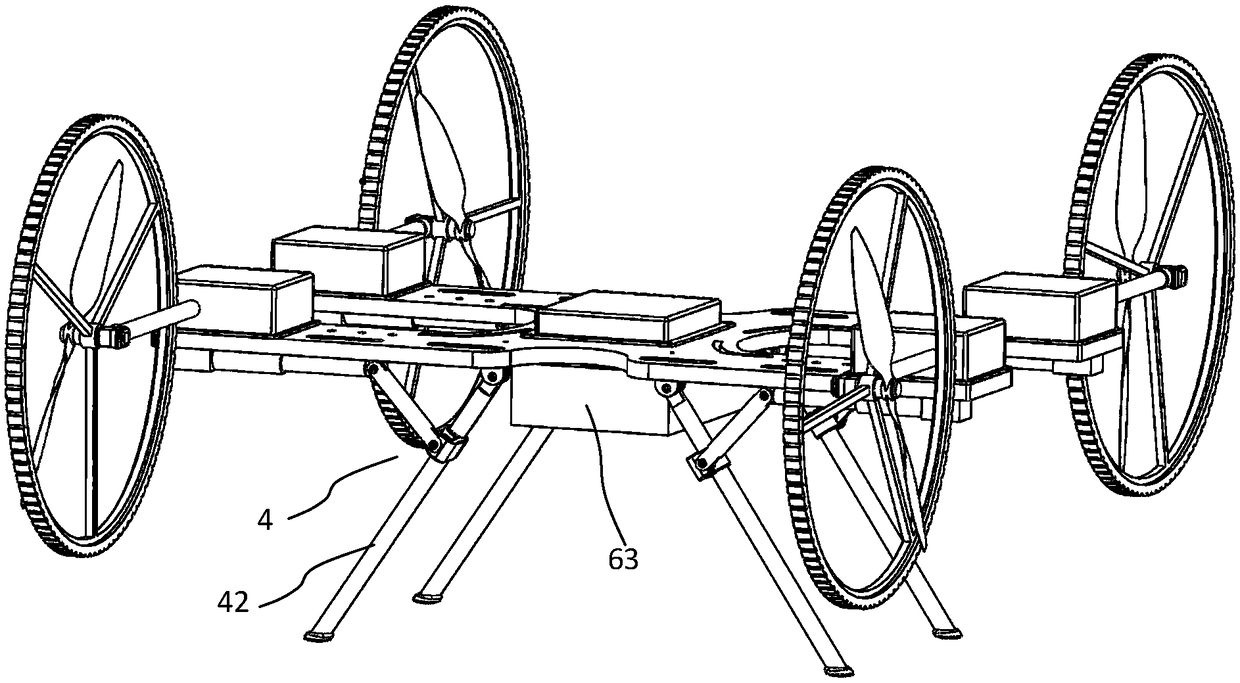
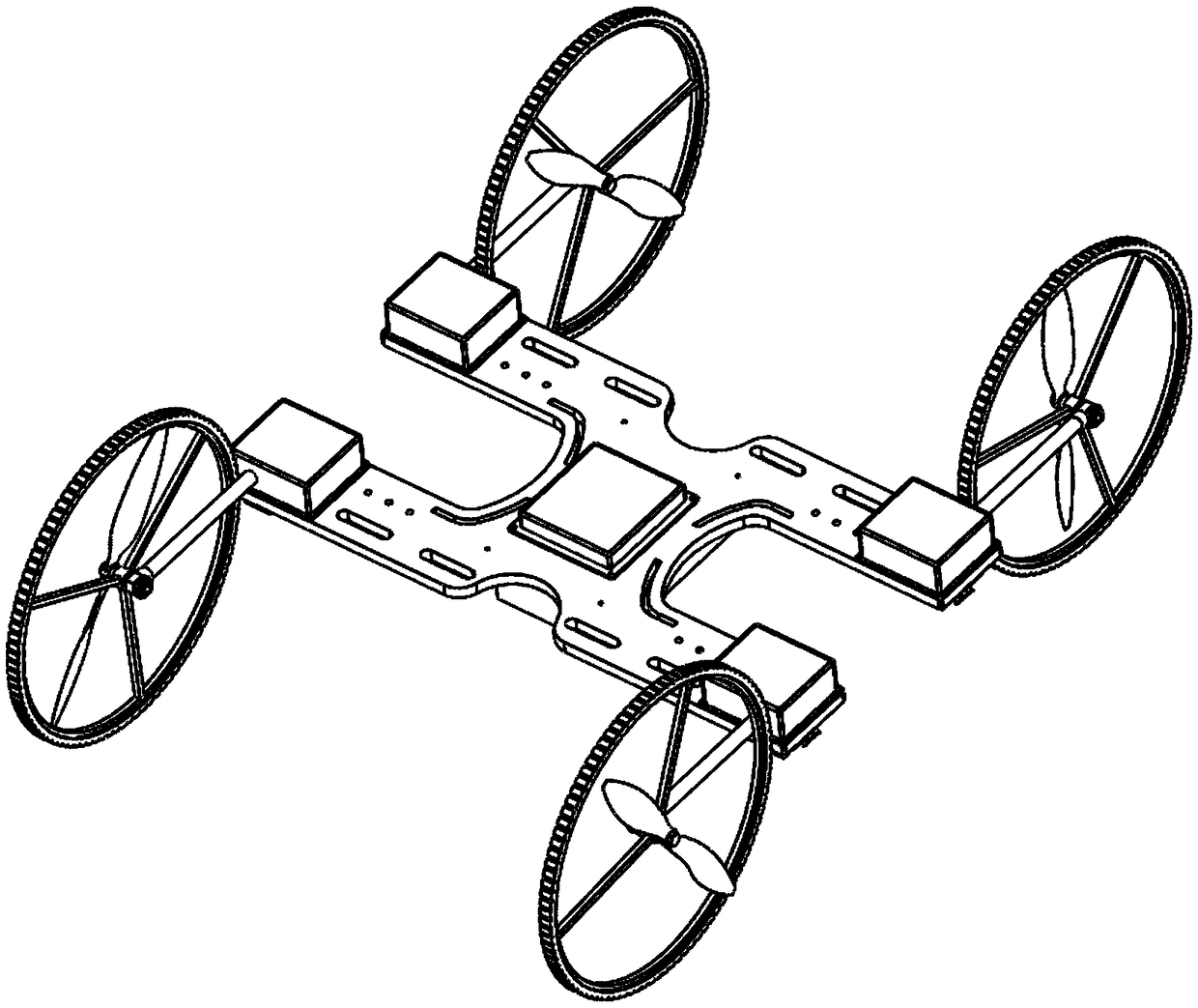
[0050] Embodiment: a kind of water, land and air amphibious rotor robot of the present embodiment, such as figure 1 , figure 2 , Figure 5 , Figure 6 shown, including:
[0051] Main body bottom plate 1;
[0052] Four rotor modules 2 are symmetrically arranged at the four corners of the main body base plate 1, and are controlled by the electronic control module 5. Driven by the rotor module 2, the amphibious rotor robot can move in three working environments: water, land and air;
[0053] The four deformation modules 3 correspond to the four rotor modules 2 respectively, and are symmetrically arranged at the four corners of the main body bottom plate 1, and are used to drive the corresponding rotor modules 2 to rotate in the vertical direction and accept the control of the electronic control module 5;
[0054] The landing gear is arranged on the bottom surface of the main body base plate 1, and is used to support the amphibious rotor robot during the process of converting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com