Track tracking control method for seabed flight nodes
A trajectory tracking and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of lack of trajectory tracking error convergence dynamic process control ability, difficulty in realizing overshoot limit, error convergence time prediction Arbitrary precision tracking and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0028] Specific implementation mode one: the specific process of a trajectory tracking control method of a submarine flight node in this embodiment is as follows:
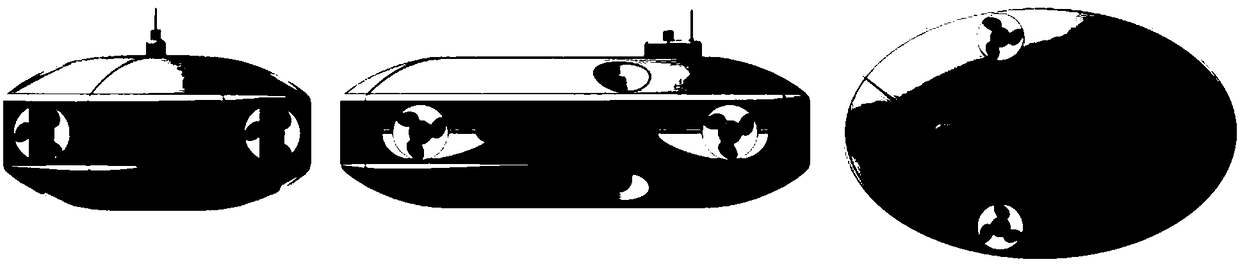
[0029] Step 1, establishing a dynamic model of OBFN based on the Fossen outline six-degree-of-freedom nonlinear model;
[0030] Inertial coordinate system (E-ξηζ): The origin E can be selected at a certain point on the sea surface, the Eξ axis and Eη axis are placed in the horizontal plane and are perpendicular to each other, and the Eξ axis is positively pointing to the true north. Eζ is perpendicular to the Eξη plane, pointing to the center of the earth.
[0031] Motion coordinate system (G-xyz): The origin G is taken at the center of gravity of the OBFN, and the x-axis, y-axis and z-axis are respectively the intersection lines of the waterplane, transverse section and mid-longitudinal section passing through the origin.
[0032] The dynamic model of OBFN can be represented by a six-degree-of-freedom nonlinear m...
specific Embodiment approach 2
[0043] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in the step one
[0044] M's derived variable M η = MJ -1 , J is the conversion matrix between the fixed coordinate system and the moving coordinate system;
[0045] C RB export variable of is the first derivative of J, v is the velocity and angular velocity of OBFN in the motion coordinate system, v=[u′,a,w,p,q,r] T ,
[0046] In the formula, u′ is the surge velocity of OBFN in the motion coordinate system, a is the sway velocity of OBFN in the motion coordinate system, w is the heave velocity of OBFN in the motion coordinate system, p is the heel angular velocity of OBFN in the motion coordinate system , q is the pitch angular velocity of the OBFN in the motion coordinate system, r is the roll angular velocity of the OBFN in the motion coordinate system, and the superscript T is the matrix transposition symbol;
[0047] C A The exported variable C Aη =C A (v r ...
specific Embodiment approach 3
[0053] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that: in the step two, the dynamic model of the OBFN established in step one is transformed to obtain a model that considers ocean current disturbance and modeling uncertainty. and a transformed OBFN dynamics model of the thruster failure effects;
[0054] Aiming at the model uncertainty, ocean current disturbance, and propeller failure considered in the patent of the present invention, consider its feasible mathematical expression.
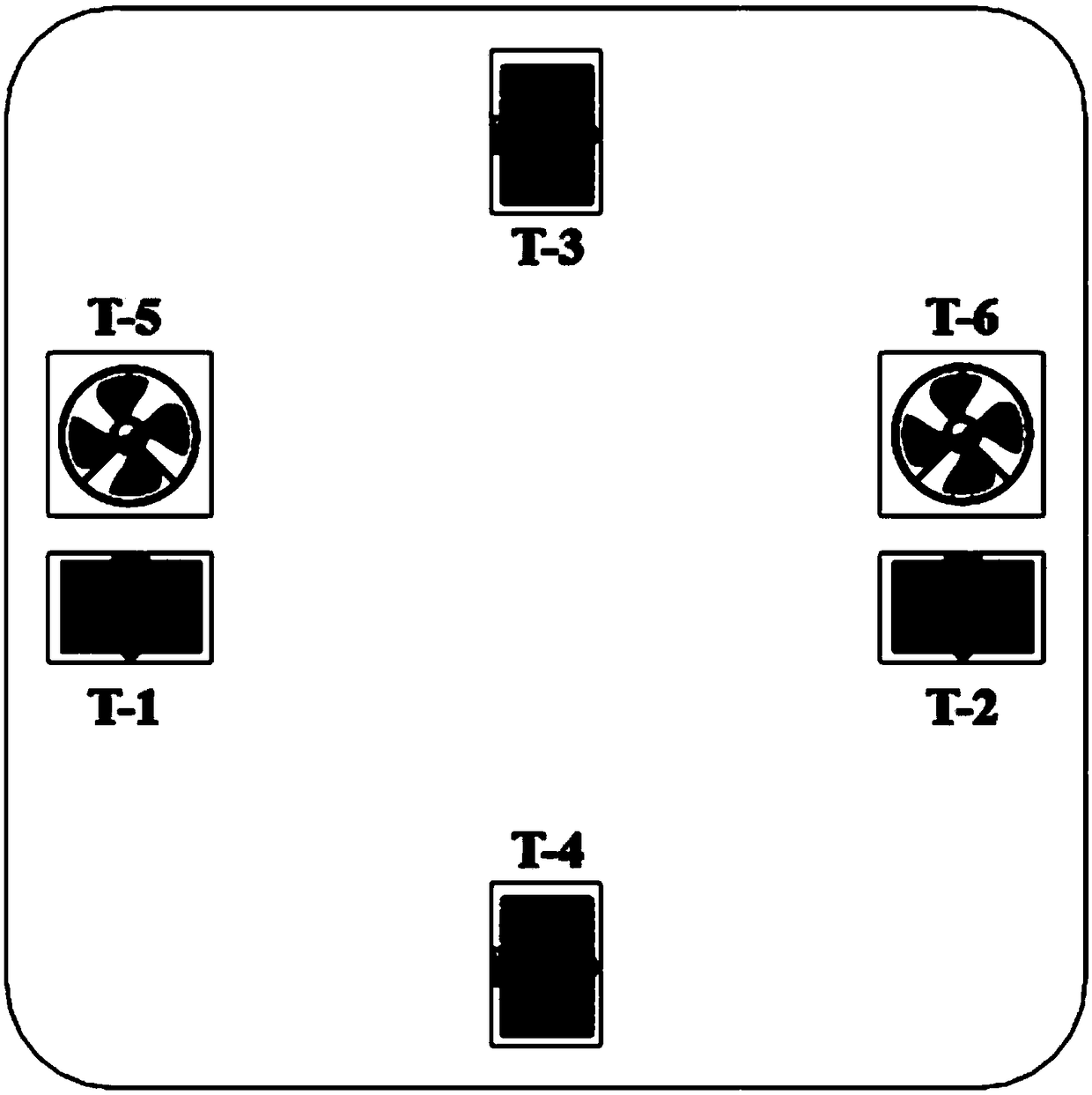
[0055] The fault effect of thrusters of OBFN can be expressed in the form of thrust distribution matrix, which is defined as ΔB[3] (WangY, Zhang M, Wilson P A, et al. Adaptive neural network-based backstepping fault tolerant control for underwater vehicles with thruster fault[J] .Ocean Engineering, 2015, 110:15-24.);
[0056] The actual control force and moment of the propeller of OBFN can be rewritten as τ+Δτ:
[0057] τ+Δτ=(B 0 -KB)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com