

3D model display interface and display method for ROV control
A display interface and model technology, applied in the direction of non-electric variable control, height or depth control, control/adjustment system, etc., can solve the problem of interrupting the acquisition of the underwater pose of the robot, so as to improve user experience, get rid of difficulties, and ensure The effect of safe navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
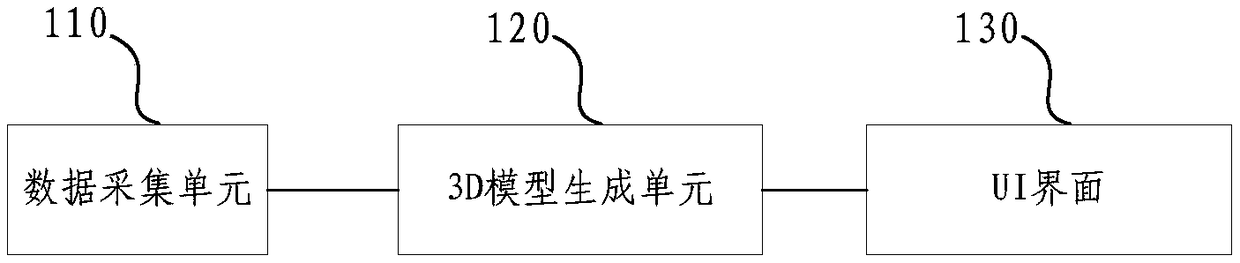
[0029] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENT 1. The first aspect of the present invention provides a 3D model display interface for ROV control, combined with figure 1 shown, including:
[0030] Data acquisition unit 110, for acquiring the running attitude data of ROV body;
[0031] The 3D model generating unit 120 is configured to perform 3D modeling based on the operating posture data and a preset coordinate system, and generate a current pose model of the ROV body.
[0032] In this embodiment, a 3D modeling tool, such as solidworks, can be used to convert the currently collected operating posture data of the underwater intelligent robot into a simulation model and present it on the user interface. The current position and posture of the ROV can be displayed through the simulation model.
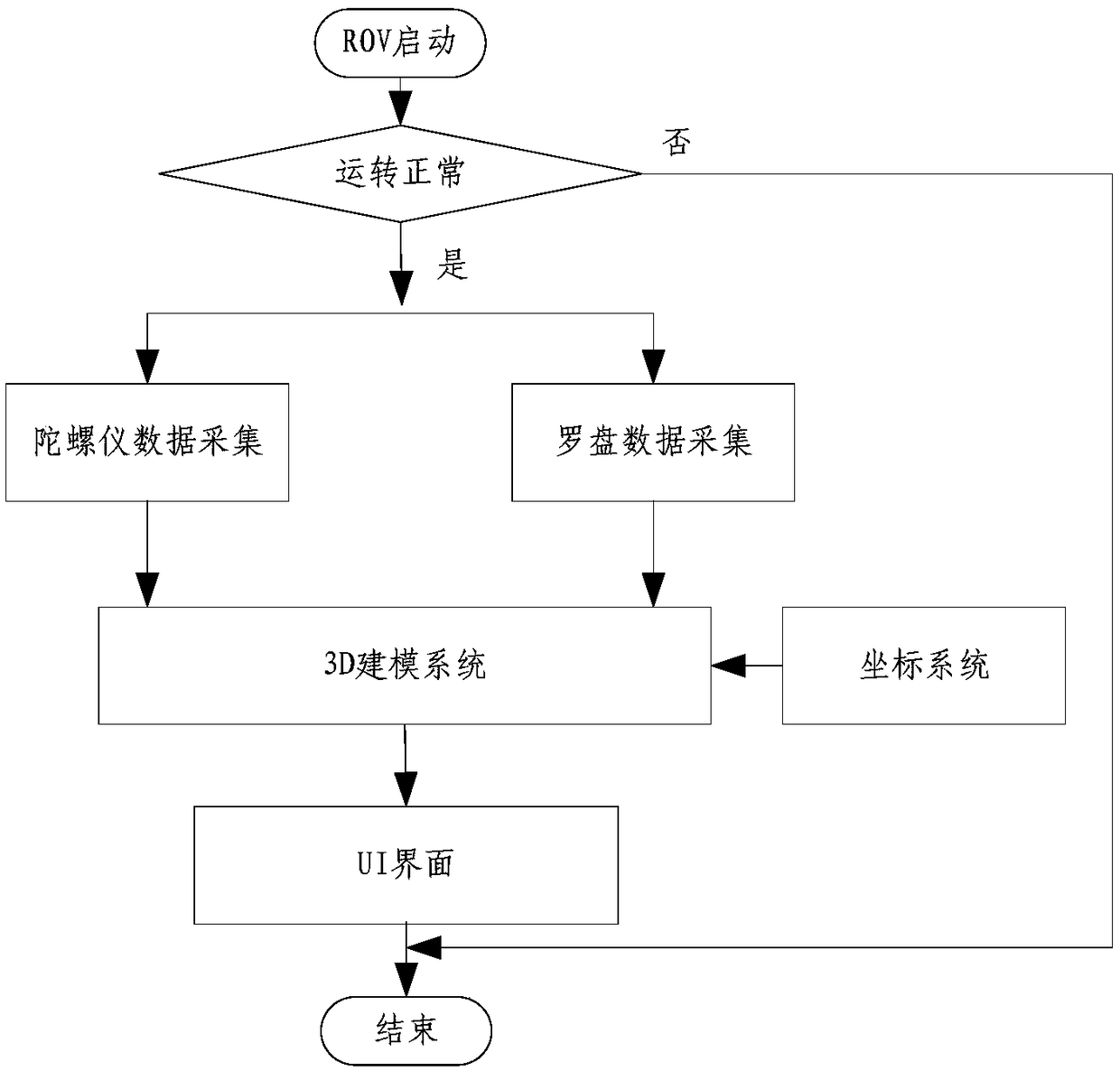
[0033] The operating attitude data can be collected through various sensors arranged on the ROV body. For three-dimensional modeling of the current form of the ROV body, a coo...
specific Embodiment approach 2
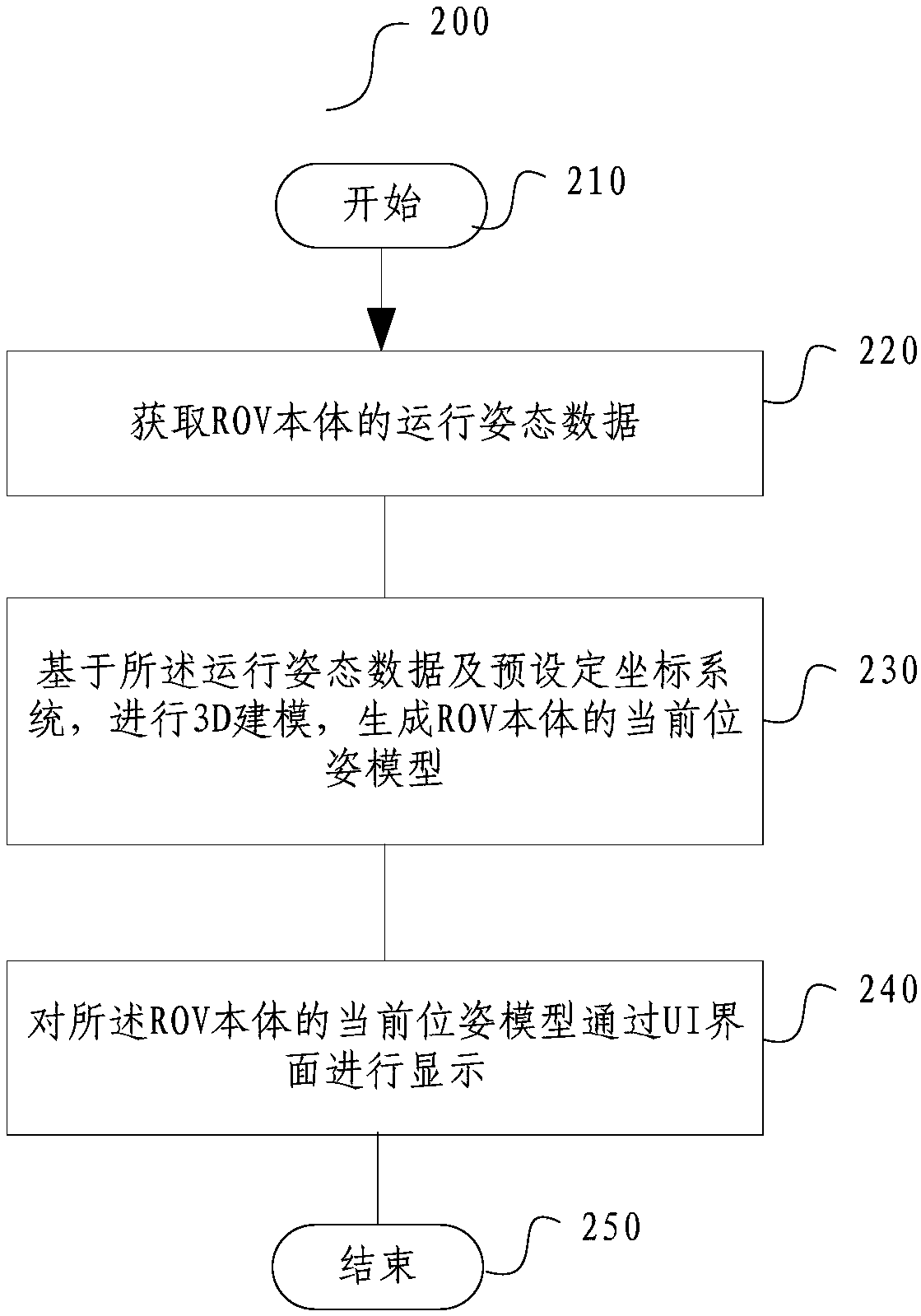
[0053] Specific Embodiment 2. Another aspect of the present invention also provides a 3D model display method for ROV control, combining figure 2 Exemplary process flow 200 shown:
[0054] It starts at step 210;
[0055] Next, execute the data collection step 220 of obtaining the running attitude data of the ROV body;
[0056] Then, execute the model generation step 230 of performing 3D modeling and generating a current pose model of the ROV body based on the operating posture data and the preset coordinate system.
[0057] In this embodiment, a 3D modeling tool, such as solidworks, can be used to convert the currently collected operating posture data of the underwater intelligent robot into a simulation model and present it on the user interface. The current position and posture of the ROV can be displayed through the simulation model.
[0058] The operating attitude data can be collected through various sensors arranged on the ROV body. For three-dimensional modeling of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More