Trajectory tracking control method for autonomous vehicles
A trajectory tracking and automatic driving technology, applied in non-electric variable control, motor vehicle, vehicle position/route/altitude control, etc. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] Attached below figure 1 The present invention will be further described.
[0073] A track tracking control method for an automatic driving vehicle, comprising the steps of:
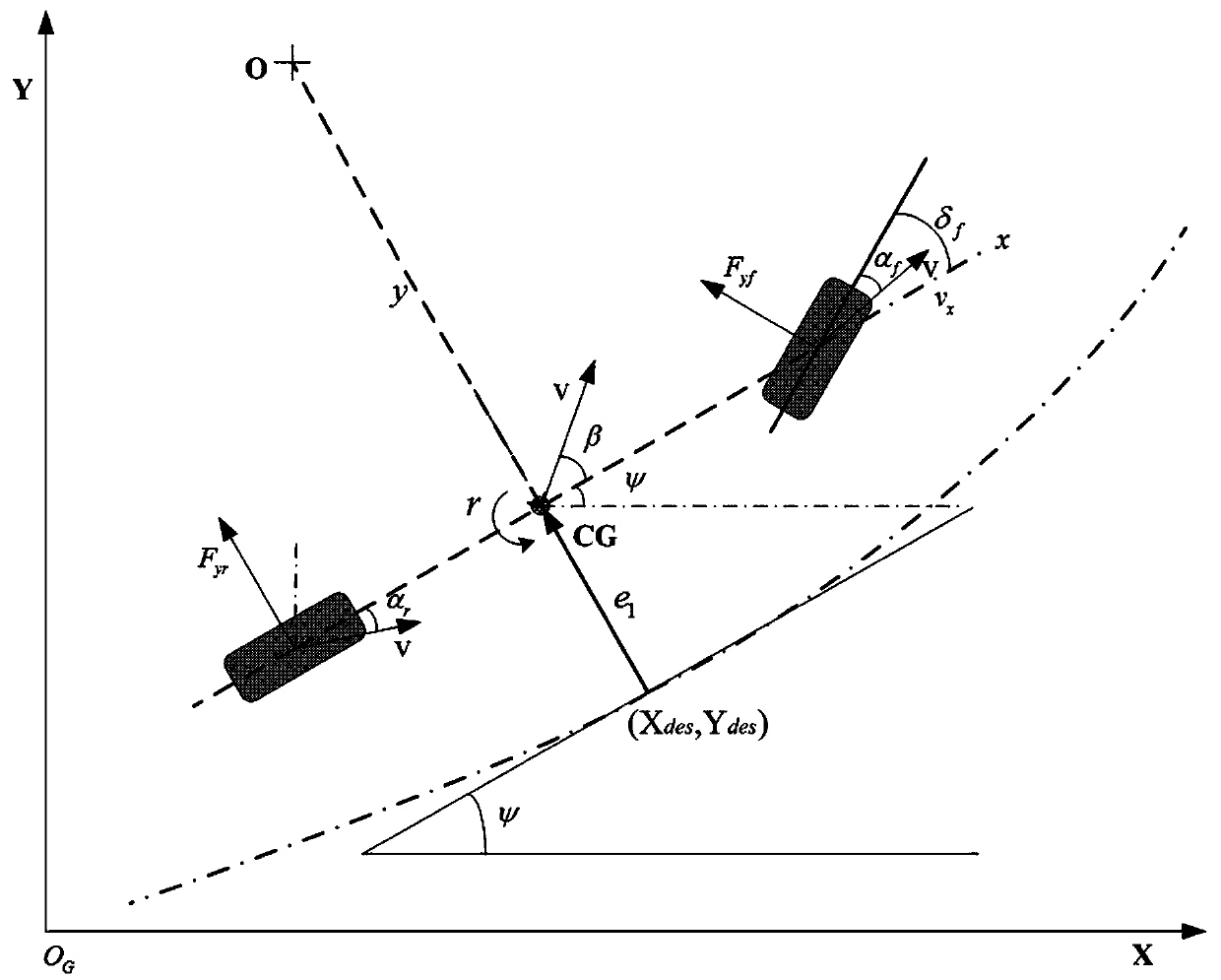
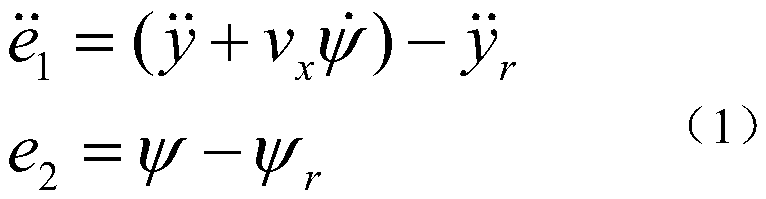
[0074] a) Establish the vehicle trajectory tracking dynamic equation as formula (1):
[0075]
[0076] in, for e 1 The second order differential of e 1 is the normal deviation from the center of mass CG of the vehicle to the ideal trajectory, e 2 is the yaw angle ψ of the vehicle and the yaw angle ψ of the corresponding reference point on the reference trajectory r The difference, the yaw angle ψ is the vehicle in the global coordinate system XO G The direction angle of Y relative to the reference axis X, O is the rotation center of the vehicle, is the second order differential of y, y is the normal deviation from the rotation center O to the vehicle center of mass CG, v x is the longitudinal velocity of the vehicle, is the first order differential of the yaw angle ψ, y r is the lat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com