

Advanced mechanical arm control system based on BCI and implementation method
A technology of a control system and an implementation method, applied in the field of intelligent robots, can solve the problems of inflexible control methods, poor safety, and complicated operations, and achieve the effects of precise multi-objective control, time saving, and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
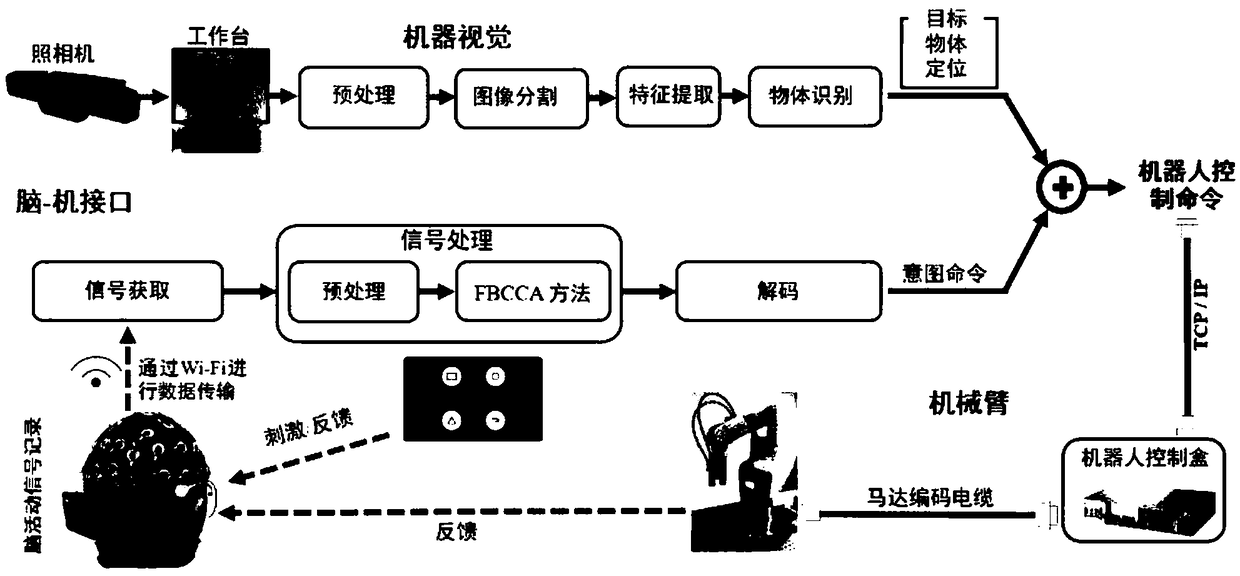
[0045] A BCI-based advanced robotic arm control system such as figure 1 As shown, it includes machine vision subsystem, brain-computer interface subsystem and robotic arm subsystem. The machine vision subsystem is used to identify and locate the coordinates of the target object. The brain-computer interface subsystem collects scalp EEG signals generated by steady-state visual evoked potentials and performs real-time analysis and feature extraction on them, so as to decode people's control intentions online and generate computer-recognizable control signals. The robotic arm subsystem can move to a corresponding position according to the user's requirements and realize the grasping of any object in the space within the scope of physical constraints. The brain-computer interface subsystem and the machine vision subsystem communicate with the manip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More