

Navigation Method Based on Iterative Extended Kalman Filter Fusion of Inertial and Monocular Vision
An extended Kalman and monocular vision technology, which is applied in image analysis, instruments, calculations, etc., can solve the problems of increased computational complexity, small computational complexity, and poor scalability, achieving increased computational complexity, simple complexity, The effect of reducing calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0117] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0118] The present invention provides a navigation method based on iterative extended Kalman filter fusion inertial and monocular vision. The present invention can maintain high precision in the process of long-term real-time positioning and navigation, and has the advantage of constant computational complexity between frames .
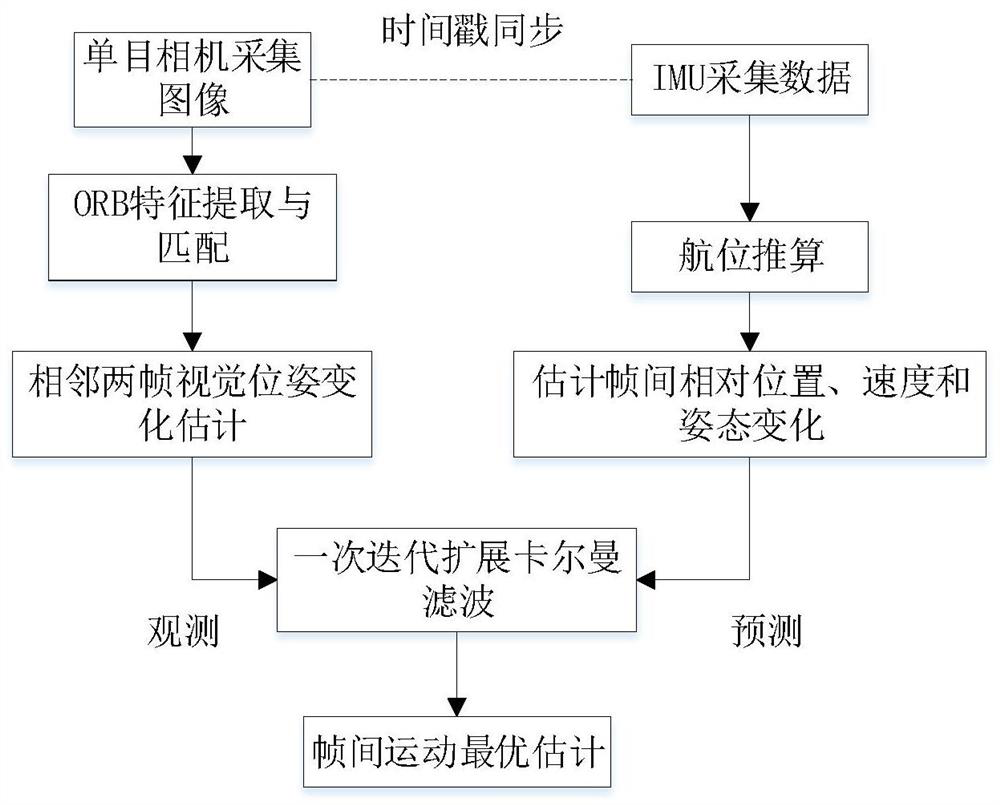
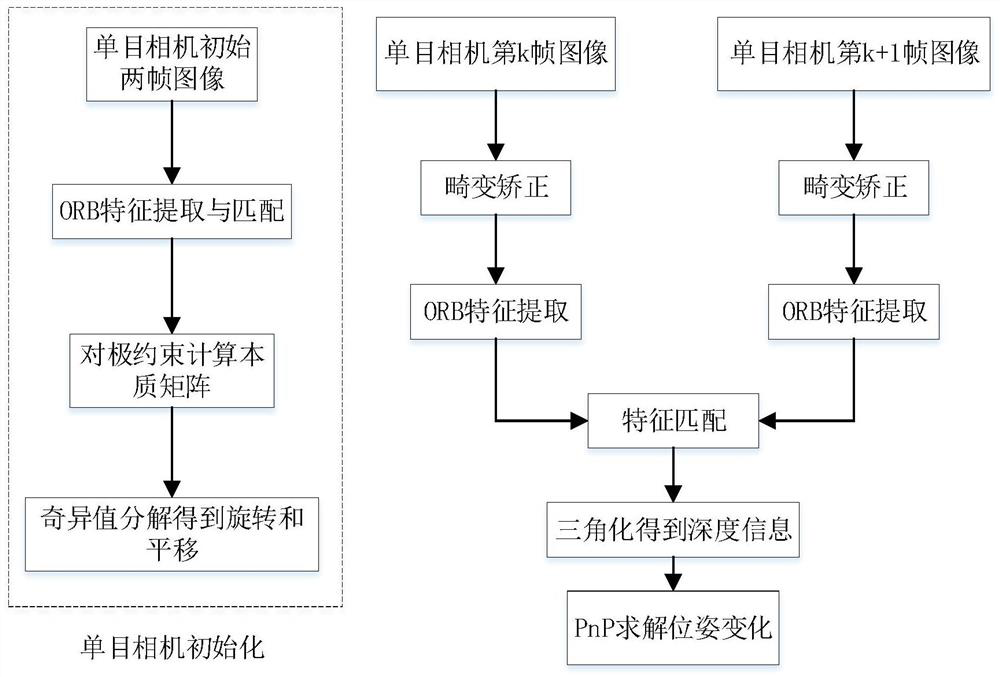
[0119] Such as Figure 1-4 As shown, a navigation method based on iterative extended Kalman filter fusion inertial and monocular vision, the method includes the following steps:
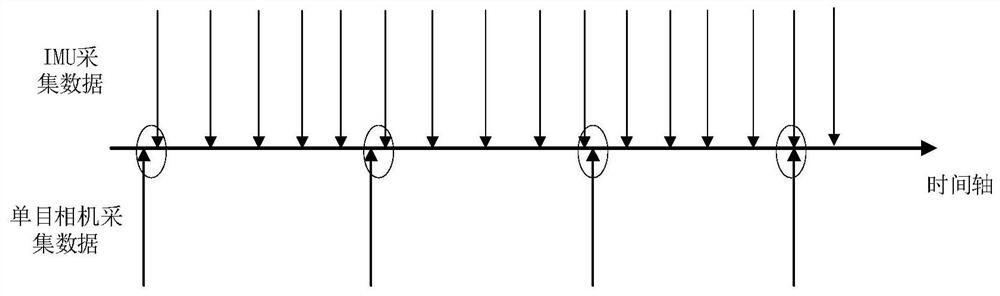
[0120] Step 1: Synchronize the time stamps of the information collected by the IMU and the monocular camera. The specific method is as follows:
[0121] The sampling frequency of an ordinary monocular camera is about 30HZ, while the sampling frequency of an IMU can reach hundreds or even thousands of hertz. On the robot operating system ROS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More