

Quadruped robot diagonal gait design method under participation of waist twisting
A quadruped robot, diagonal gait technology, applied in instruments, simulators, control/regulation systems, etc., can solve problems such as performance limitations, lack of waist motion in multi-legged robots, and improve rationality and motion stability. , the effect of good bionic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention. It should be noted that, for the purpose of clarity, representations and descriptions of components and processes that are not related to the present invention and known to those of ordinary skill in the art are omitted from the drawings and descriptions.
[0039] This embodiment provides a quadruped robot diagonal gait design method involving waist twisting, including:
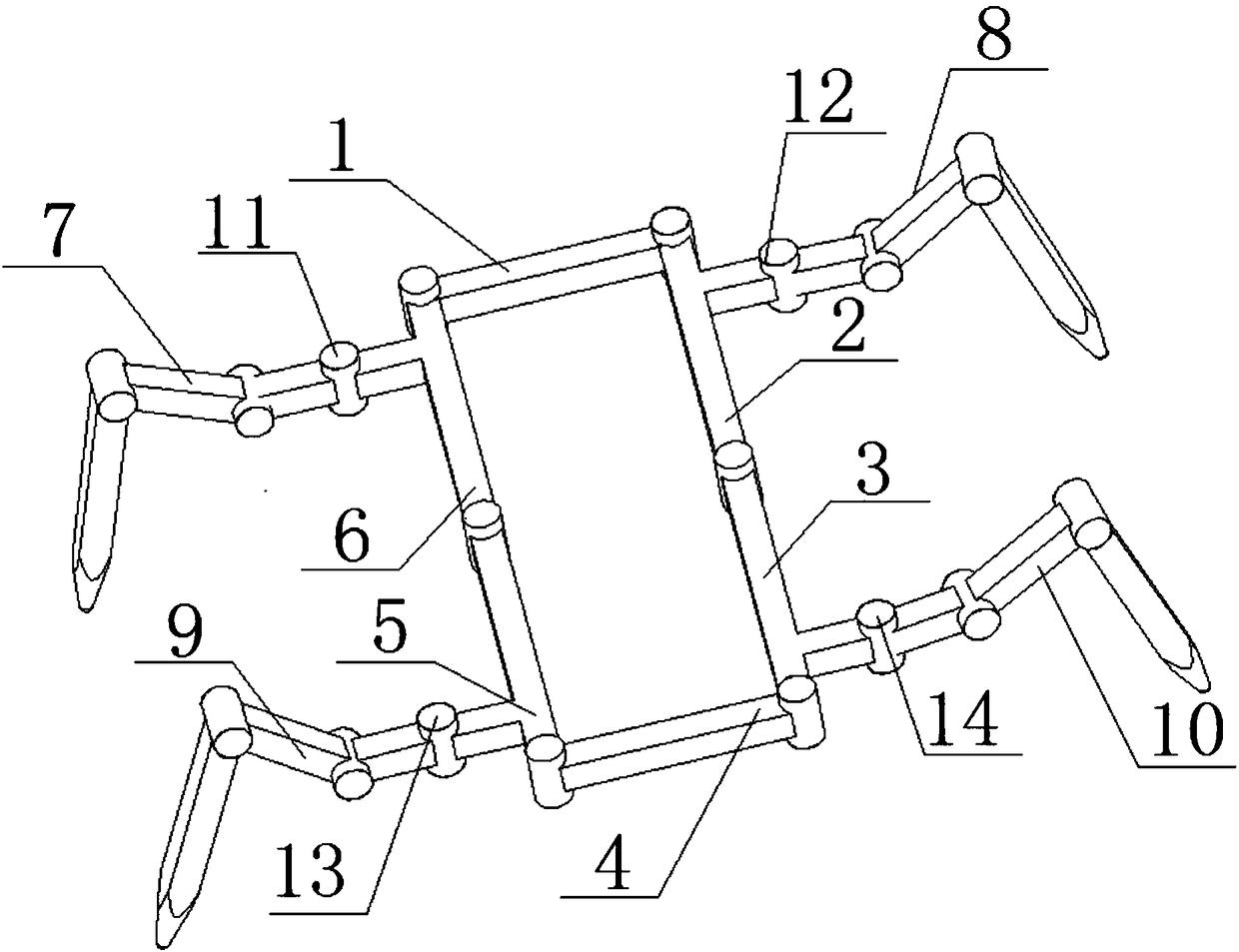
[0040] S1: Such as figure 1 As shown,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More