

Precise landing control system and method based on multi-information fusion
A multi-information fusion and landing control technology, applied in the field of UAVs, can solve the problems that PID parameters cannot adapt to the external environment, it is difficult to be compatible with DJI series commercial flight controllers, and it cannot meet the take-off and landing requirements, and achieve the target landing with high precision and high landing accuracy. The effect of stable process and strong ability to resist environmental interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
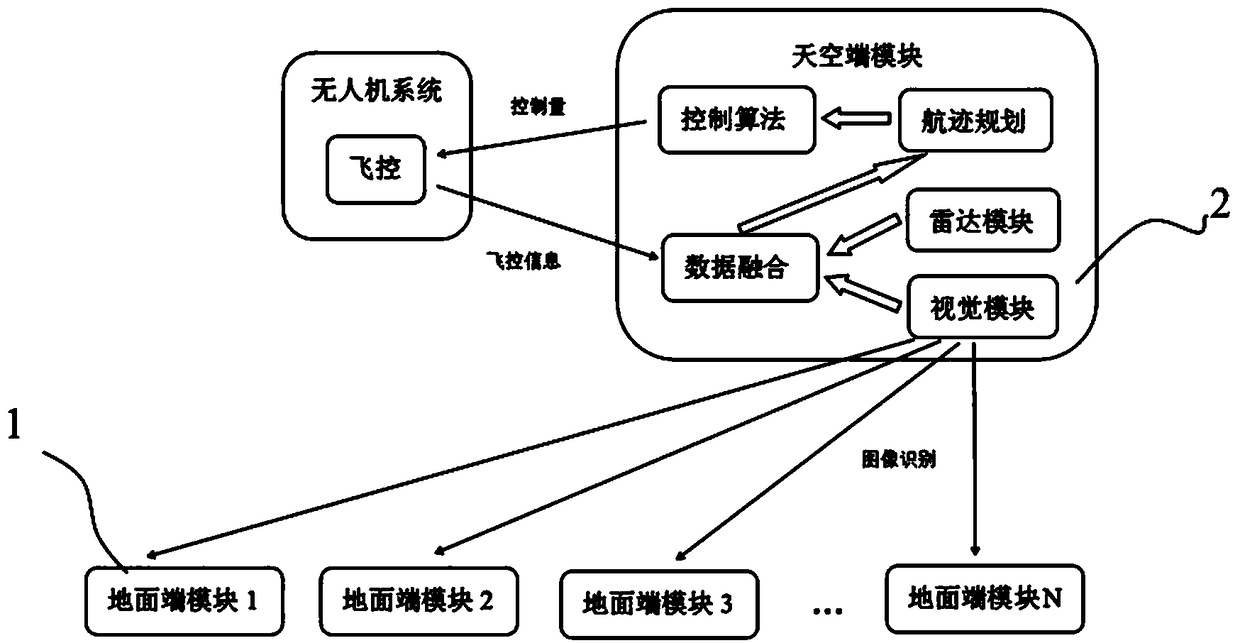
[0035] Such as figure 1 As shown, the precise landing control system based on multi-information fusion of the present invention includes:
[0036] The ground terminal module 1, as the precise landing target point of the UAV, is composed of multiple infrared emitting lights, and transmits infrared images to the sky for identification by the air terminal module 2;
[0037] The air terminal module 2 includes a millimeter-wave radar, a vision module and a processor. The vision module is used to collect and recognize the infrared image emitted by the ground terminal module 1, calculate the relative position of the ground terminal module 1, and use the millimeter wave radar to detect the relative height of the ground , the processor fuses the vision module, the millimeter wave radar and the flight control information of the UAV system acqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More