

Aerial video highway lane line detection method based on line spacing characteristic point clustering
A lane line detection and feature point technology, which is applied in the field of image processing and traffic video detection, can solve the problems of low detection speed, low accuracy, and inability to meet the needs of real-time detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
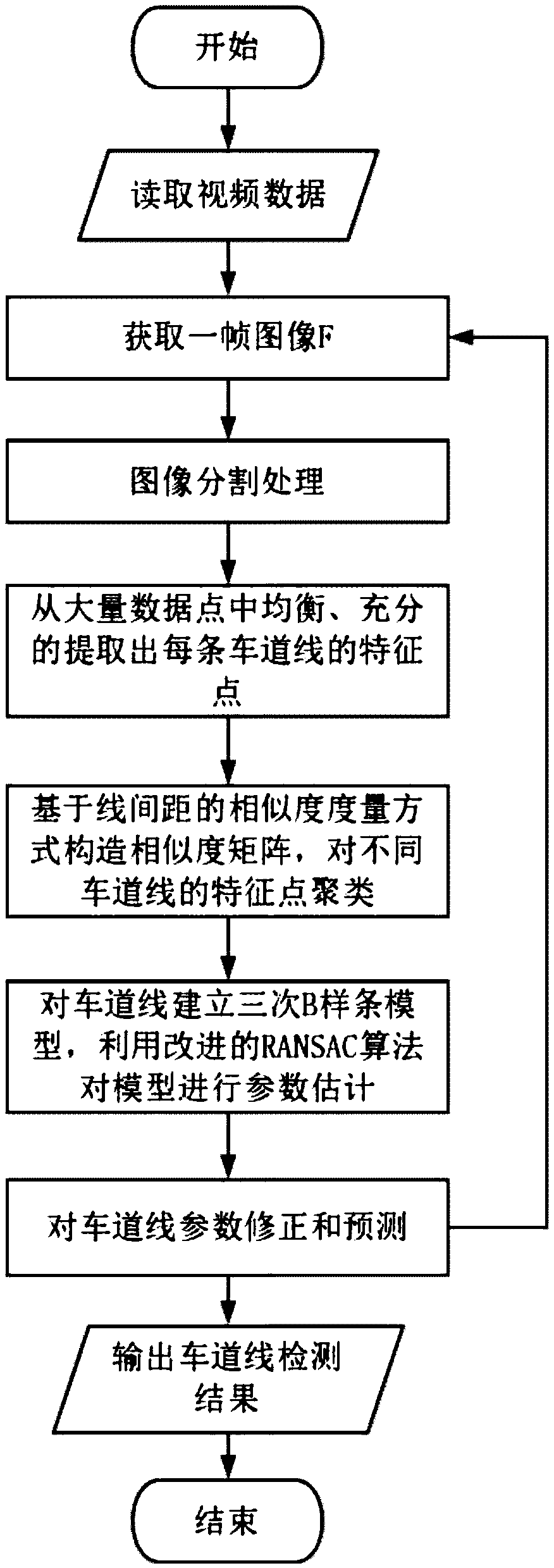
[0098] The present invention provides a method for detecting highway lane lines in aerial photography video based on line spacing feature point clustering, the process of which is as follows figure 1 shown, including the following steps:
[0099] Step 1: Read Video Frames
[0100] Read the video file from the drone's on-board camera to obtain a frame of color image F with the size of W×H×3, where W and H are positive integers, representing the width and height of the color image, respectively.
[0101] Step 2: image segmentation processing, including the following sub-steps:
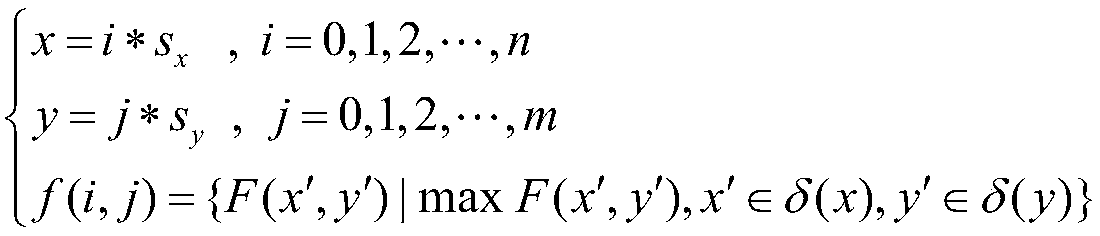
[0102] Step 2.1: Downsampling
[0103] Let the sampling ratio be s x ,s y , then t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More