

Backstepping control method of load simulator based on expansion state observer
A technology of load simulator and expansion state, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of limited controller performance, model uncertainty, poor estimation accuracy of high-gain feedback parameters, etc. Achieve the effect of reducing impact, improving accuracy, and not easy to sample interference and noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
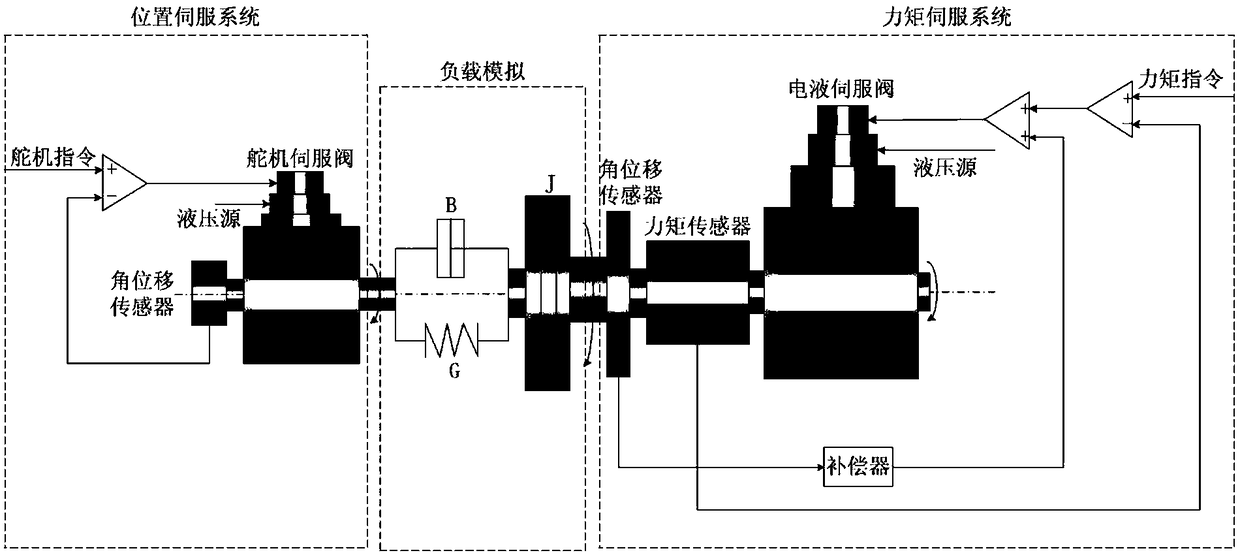
[0111] The parameters of the dual vane hydraulic motor force control load simulator are:
[0112] D. L =9×10 -4 m 3 / rad,J L =0.32kg·m 2 , B=4000N·m·s / rad, β e =7×10 8 Pa,
[0113] C t =9×10 -12 m 5 / (N·s), P s =10×10 6 Pa, P r = 0 Pa, V t =8×10 - 5 m 3 ,
[0114] K t =9×10 -12 m 3 / s / Pa,
[0115] Comparison of simulation results: The parameters of the controller designed in this paper are selected as: w 0 = 0.15.
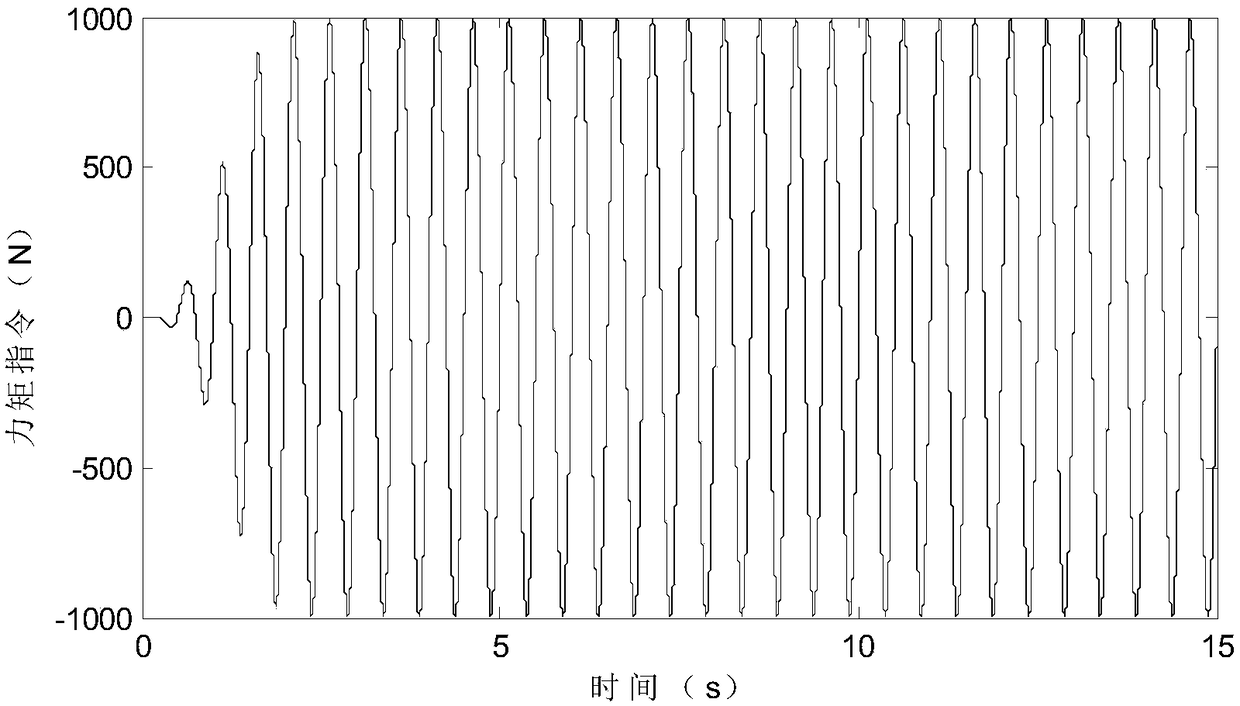
[0116] The trajectory of the selected system is The expected trajectory of the system is The tracked torque command is a curve
[0117] figure 2 is the given tracking torque command curve of the present invention.
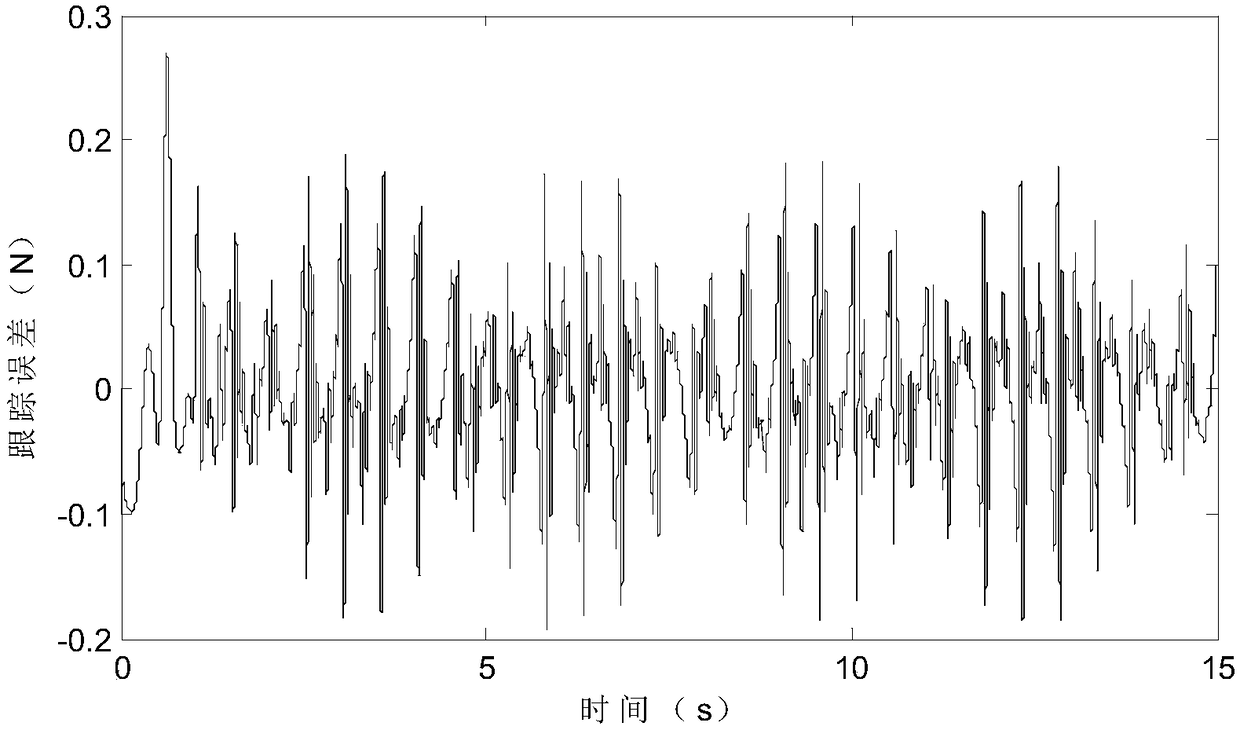
[0118] image 3 It is the curve of the system tracking error changing with time. It can be seen that the tracking error is bounded and stable. Although the vibration is relatively severe, its amplitude is very small compared to the amplitude of the command.
[0119] Figure 4 It is the curve of the control input of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More