

Mechanical arm on double-arm mechanical arm automatic line
A technology of manipulators and automatic lines, applied in the field of manipulators, can solve the problems that manipulators are difficult to function, cannot carry and move objects, and have limited operating space, and achieve the effects of improving work safety, accurate positioning functions, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
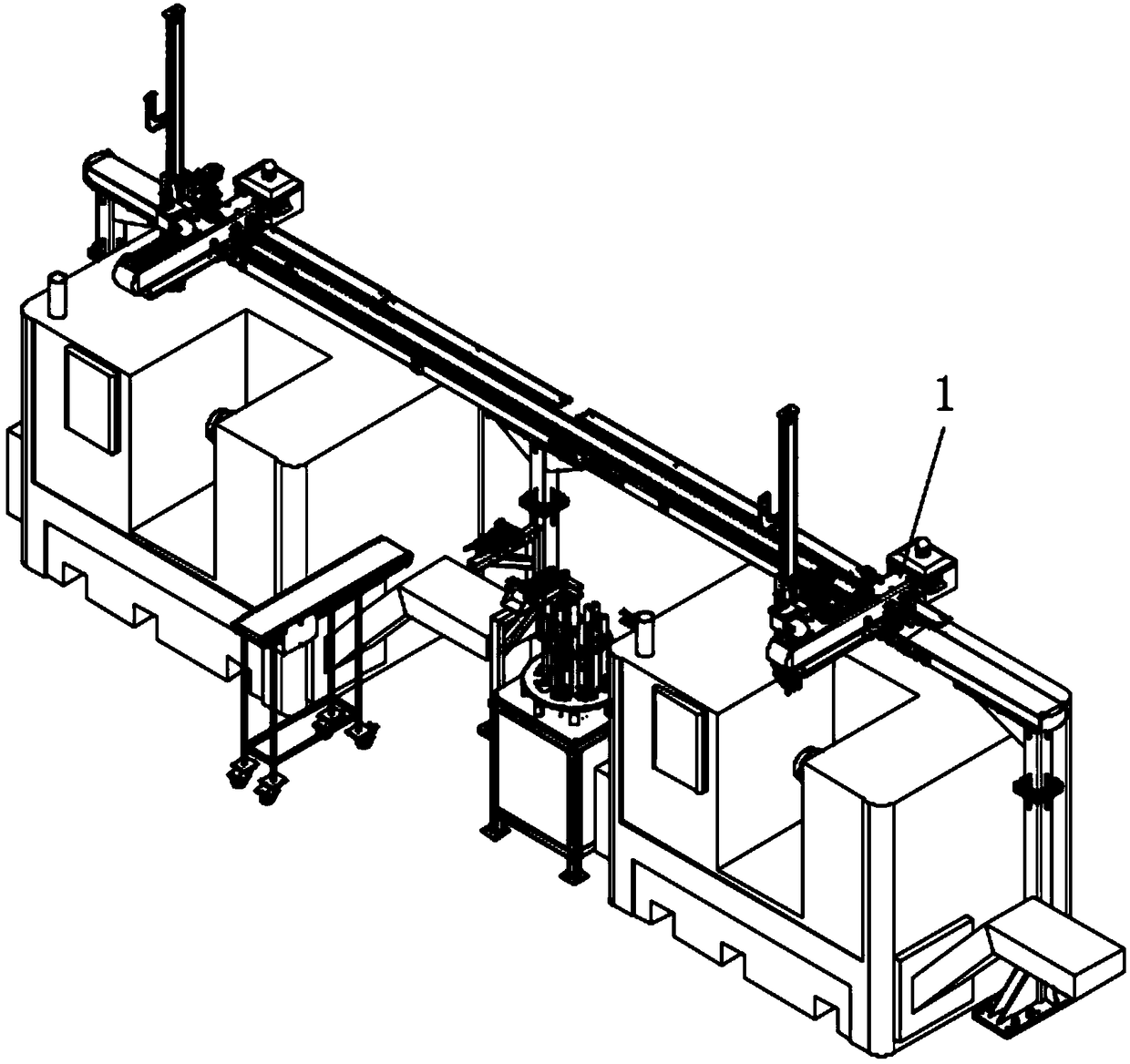
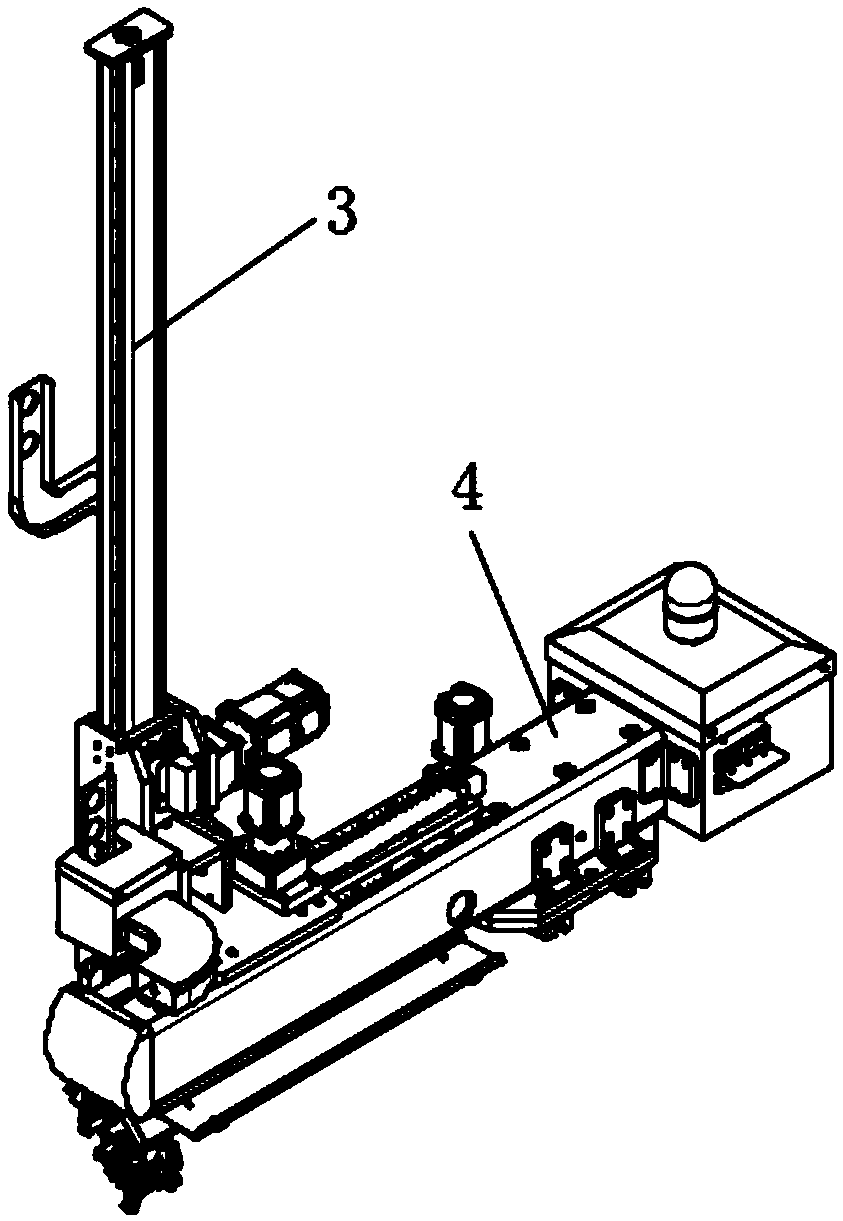
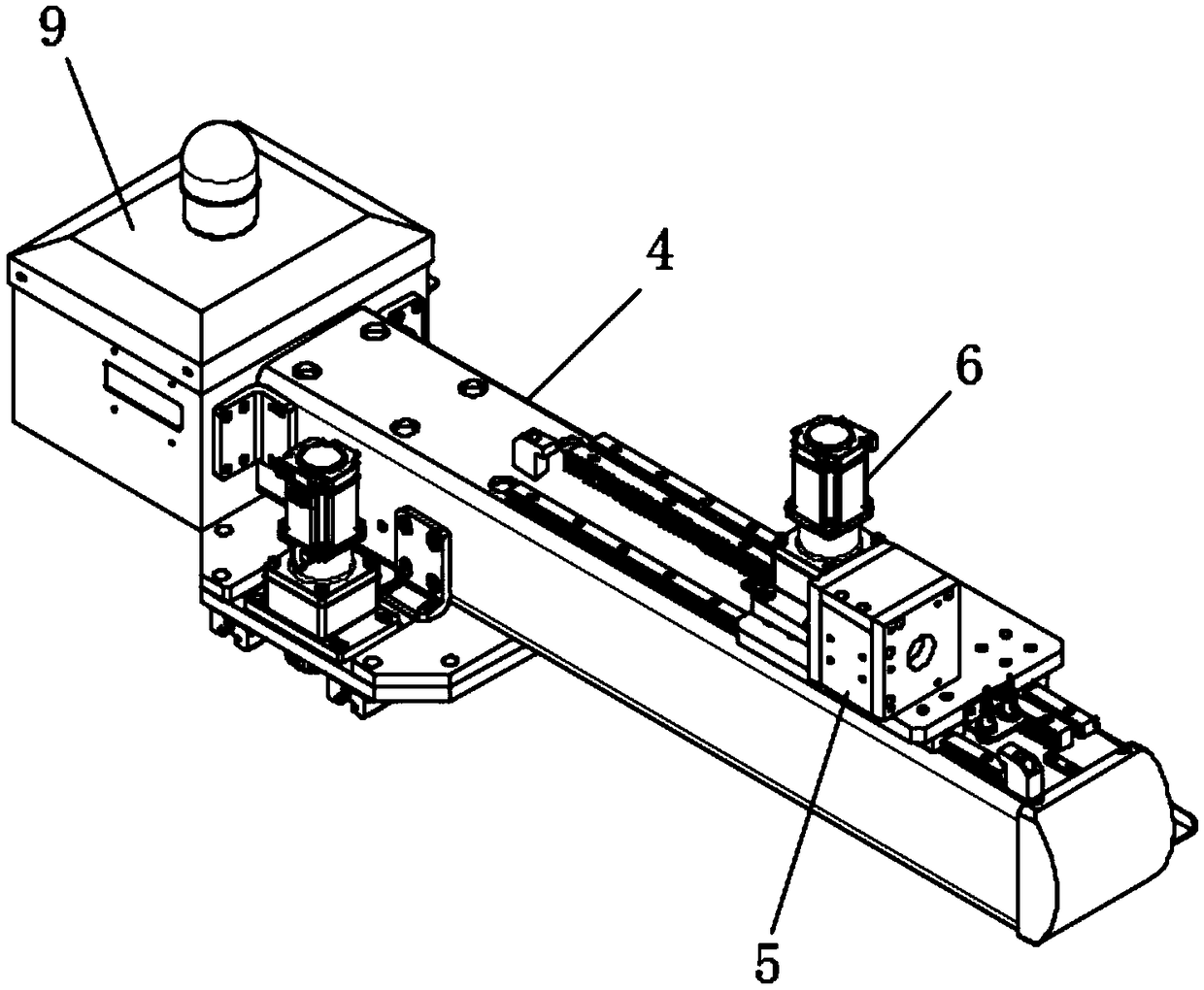
[0032] refer to Figure 1-10 , a manipulator in the automatic line of a double-arm manipulator, comprising a manipulator 1 arranged on the X-axis of the double-arm manipulator automatic line, the manipulator 1 is composed of a horizontal movement part and a vertical movement part, and the horizontal movement part includes a Y-axis base 4, a Y-axis base The two ends of 4 are respectively equipped with junction box 9 and beam cover 19, and one end of Y-axis base 4 is installed with junction box connecting plate 16 connected with junction box 9 through bolts, and solenoid valve and terminal block are installed inside junction box 9, The solenoid valve is used to control the switch of the electrical components on the manipulator. The terminal block is used to carry multiple or multiple sets of mutually insulated terminal assemblies and to fix the insulating components of the support. The end of the junction box 9 close to the Y-axis base 4 is provided with a wiring hole. 10. The w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More