

Anti-toppling stacker robot
A technology of robots and stackers, applied in the direction of lifting devices, lifting equipment safety devices, etc., can solve the problems of easy rollover of stacking robots, achieve the effect of improving stability and reducing damage to stacking robots and items
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
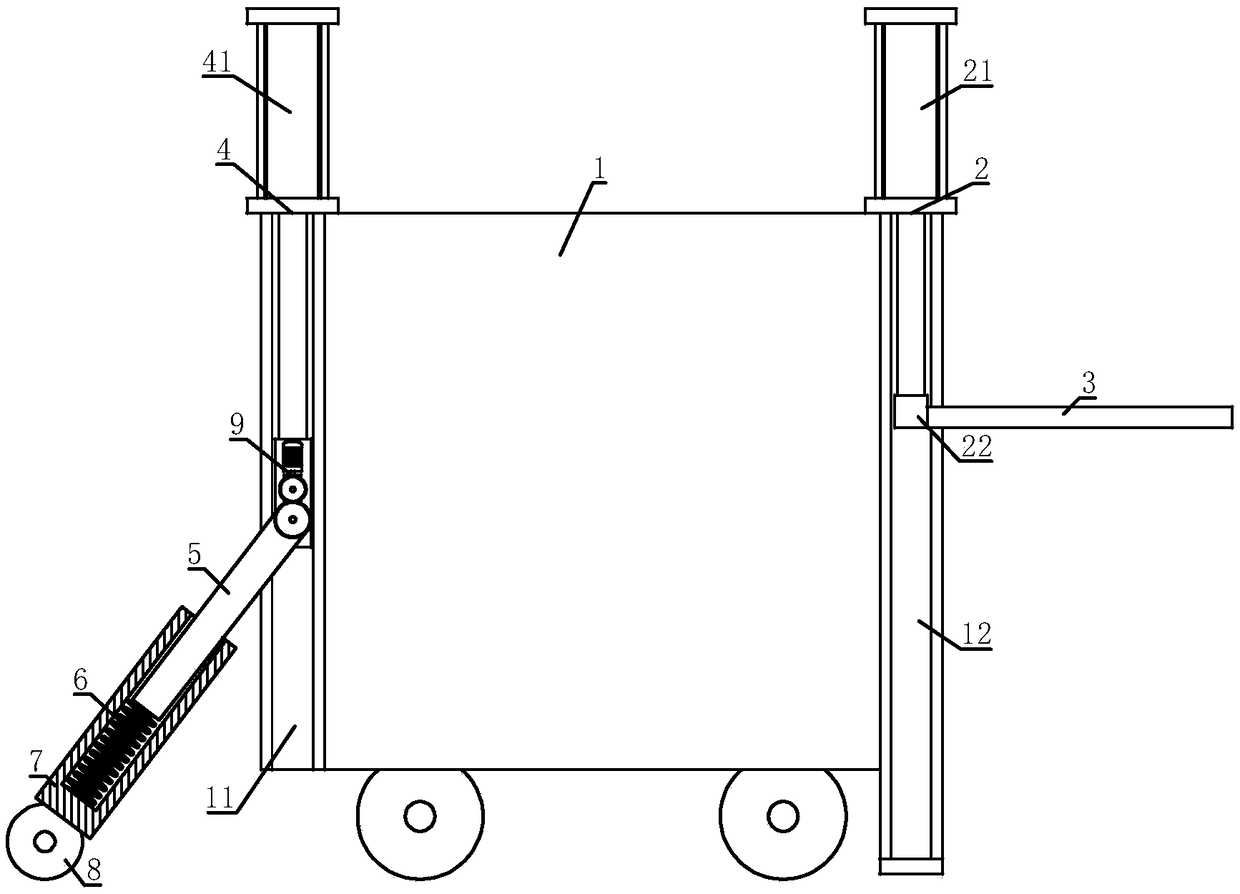
[0027] A stacker robot for preventing dumping, comprising a robot main body 1, an object lifting mechanism 2 is installed on the robot main body 1, an object supporting plate 3 is connected to the object lifting mechanism 2; an anti-tilt lifting mechanism is also connected to the robot main body 1 Mechanism 4, the anti-tilt lifting mechanism 4 is connected with a support rod 5, the other end of the support rod 5 is connected with a spring 6, and the other end of the spring 6 is connected with a support tube 7, and the spring 6 and the support rod 5 are both sleeved on the support tube 7 Inside, a roller 8 is connected to the supporting cylinder 7 .
[0028] The object-supporting lifting mechanism 2 of the present invention can drive the object-bearing plate 3 to move up and down, and then the object-bearing plate 3 can move the articles to a suitable height, which is convenient for article stacking. When the anti-tilt lifting mechanism 4 lowers the support rod 5 to a suitable ...
Embodiment 2
[0030] On the basis of Embodiment 1, the anti-tilt lifting mechanism 4 includes an anti-tilt cylinder 41, the anti-tilt cylinder 41 is installed on the robot main body 1, a sliding plate 42 is fixed on the piston rod of the anti-tilt cylinder 41, and the support rod 5 is connected to On the sliding plate 42 ; the robot main body 1 is provided with an anti-tilt chute 11 , and the sliding plate 42 is sleeved in the anti-tilt chute 11 .
[0031] The anti-tilt cylinder 41 can lift the slide plate 42, so that the support rod 5 and the support tube 7 can move to a suitable height. The sliding plate 42 always slides in the anti-tilt chute 11 to improve the stability of the sliding plate 42 during movement.
Embodiment 3
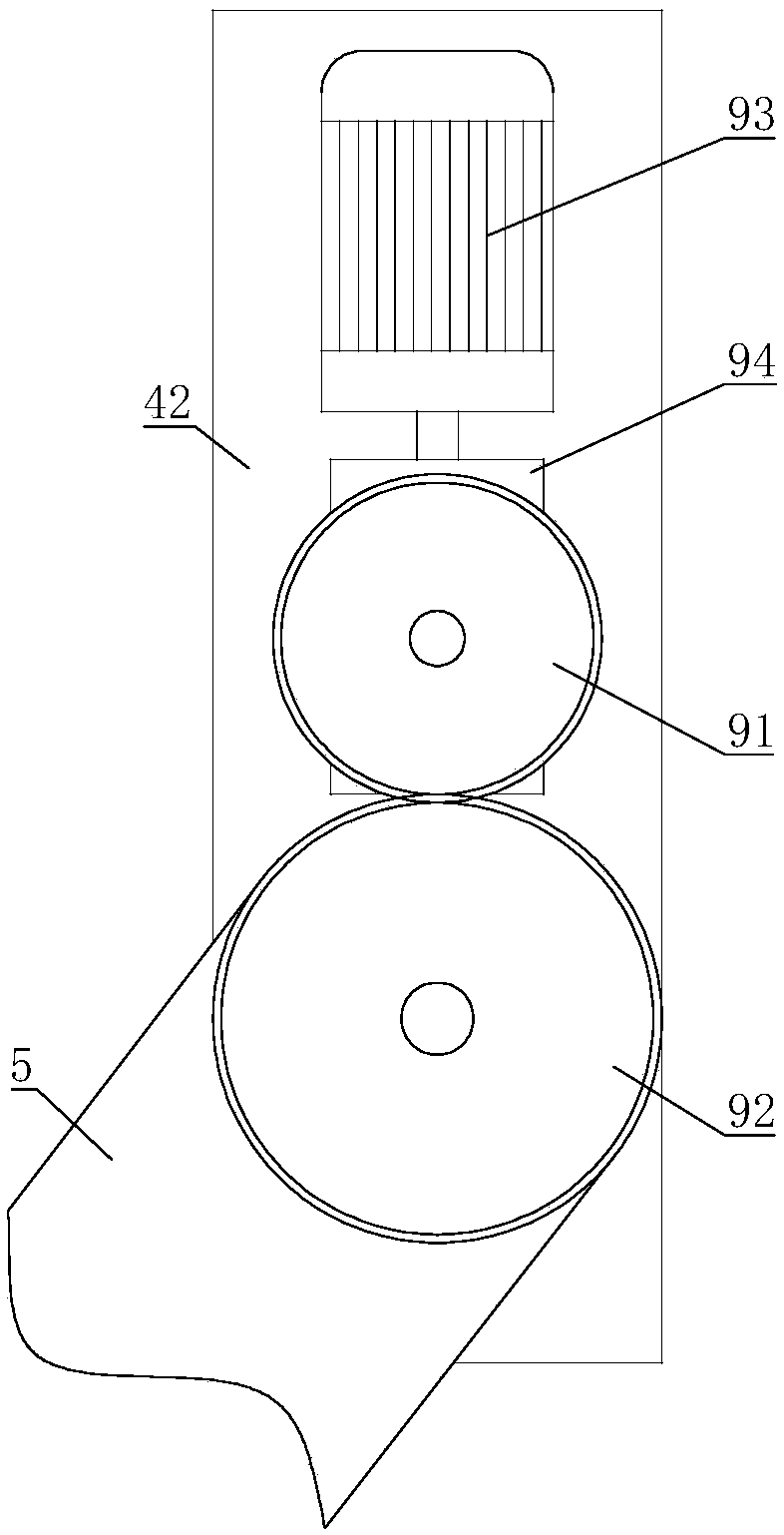
[0033] On the basis of Embodiment 1 or Embodiment 2, the support rod 5 is hinged with the sliding plate 42, the driving mechanism 9 is installed on the sliding plate 42, the output shaft of the driving mechanism 9 is connected with a driving gear 91, and the driving gear 91 is meshed with The driven gear 92 , the driven gear 92 is fixed on the supporting rod 5 , and the driven gear 92 is concentric with the rotating shaft of the supporting rod 5 .
[0034] When driving mechanism 9 drives driving gear 91 to rotate, driving gear 91 drives driven gear 92 to rotate, then support bar 5 tilts with driven gear 92, then support bar 5 and support tube 7 can be adjusted to suitable inclination angle, facilitates support tube 7 The rollers 8 on the top are stably supported to the ground, and when the robot main body 1 tilts, the support cylinder 7 and the support rod 5 have sufficient supporting force to support the robot main body 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More