

A*algorithm-based path planning method
A path planning and algorithm technology, applied in the field of intelligent robots, can solve problems such as potential safety hazards and approaching obstacles, and achieve the effect of ensuring safety and reducing the number of bending times
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited to these embodiments.
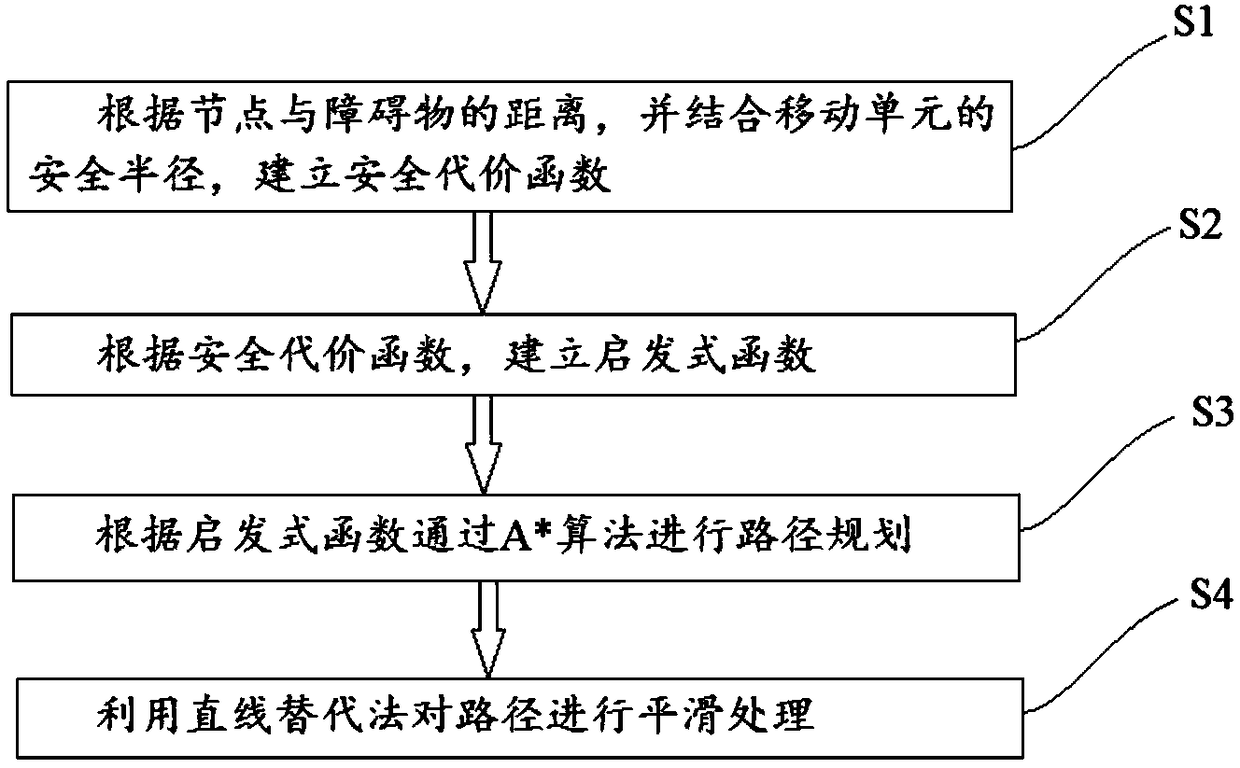
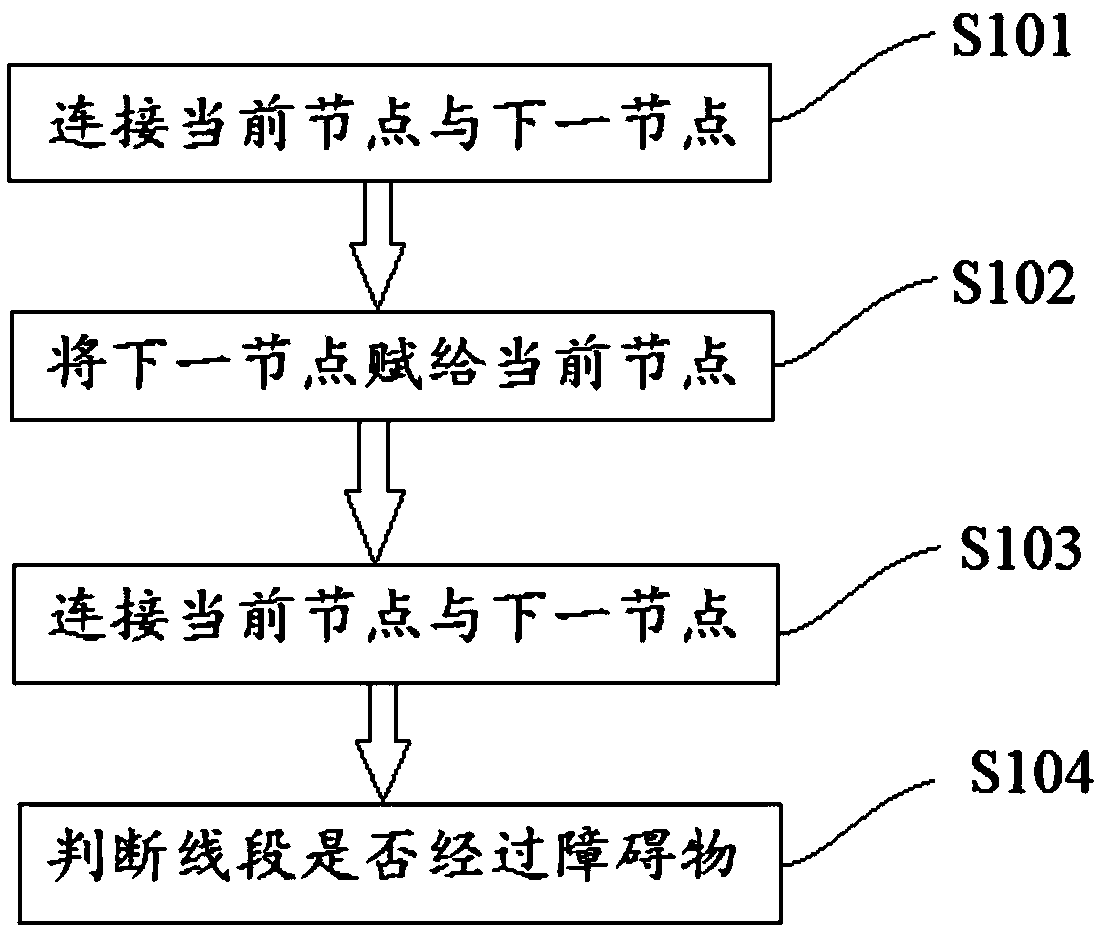
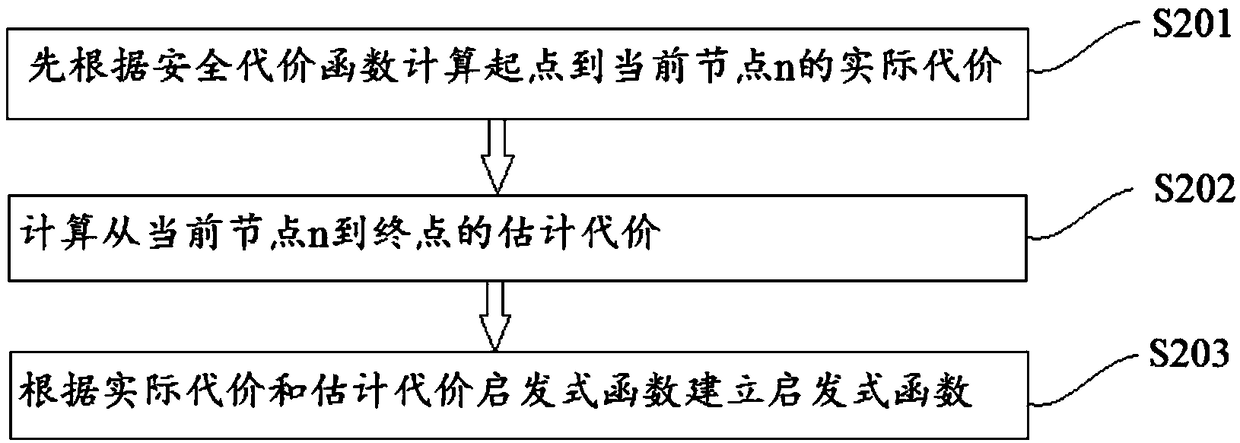
[0045] In the process of traversing nodes in the traditional A* algorithm, no matter how far the node is from the obstacle, the cost estimate of the mobile unit passing through it is equal. This makes the path planned by the A* algorithm likely to be close to obstacles, and there are potential safety hazards. The embodiment of the present invention proposes a path planning method based on the A* algorithm, improves the heuristic function of the A* algorithm, and adds safety cost estimation to it, so that the planned path is far away from obstacles, ensuring the safety of the robot during driving. Safety; the straight line substitution method is used to smooth the path, making the path continuous and smooth, and reducing the number of bending times of the path.
[0046] Such as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More