Detection method of unmanned aerial vehicle cruising around girder used for bridge detection
A bridge detection and detection method technology, applied in three-dimensional position/channel control, non-electric variable control, instruments, etc., can solve the problem of difficulty in ensuring the comprehensiveness and accuracy of detection data, unfavorable detection and elimination of column diseases, and uneven image quality To achieve good economic benefits, eliminate detection blind spots, improve shooting accuracy and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
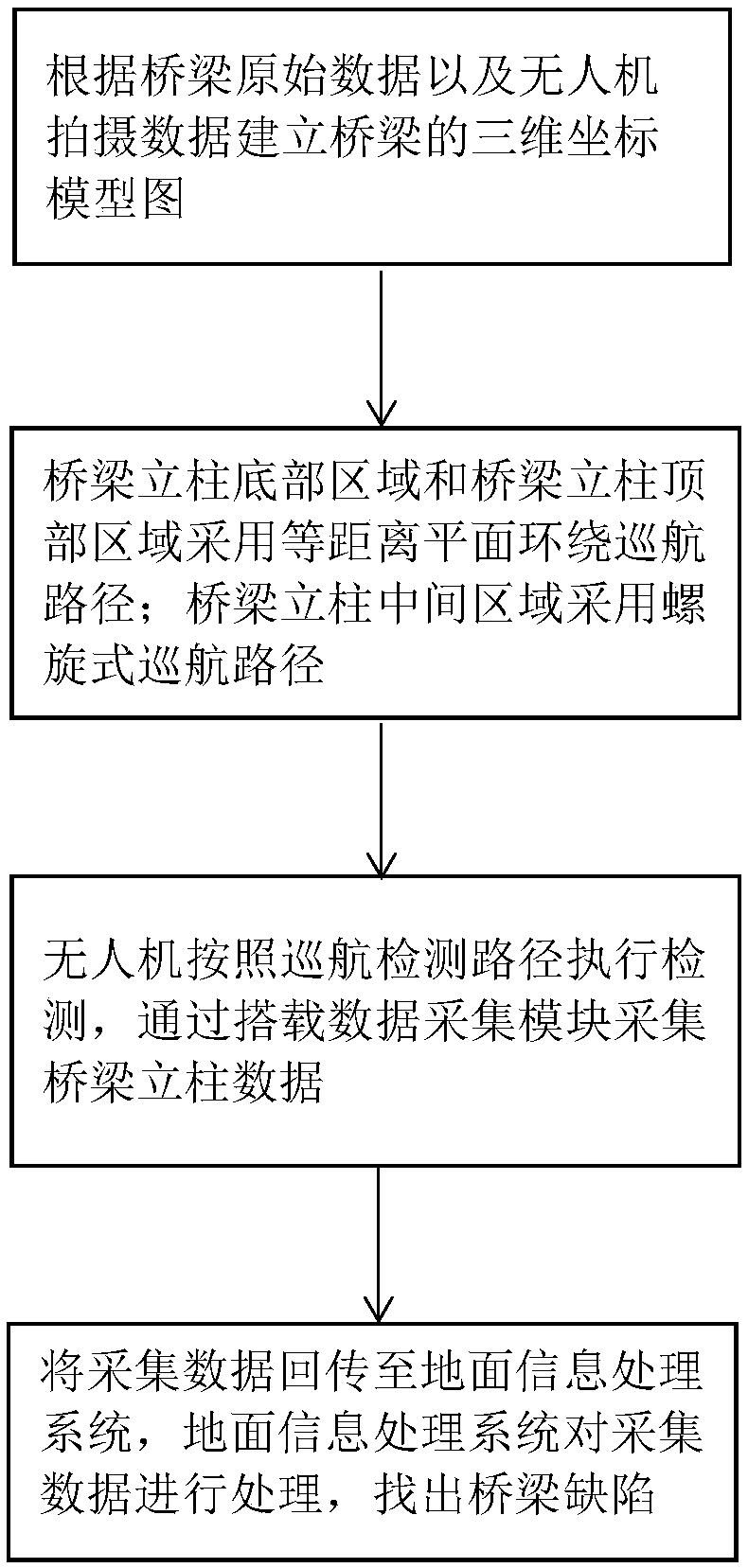
[0034] The present invention is used for the detection method of unmanned aerial vehicle cruising around the beam for bridge detection, according to figure 1 process, including the following steps:
[0035] Step S1: Establish a three-dimensional coordinate model diagram of the bridge based on the original data of the bridge and the data taken by the UAV, and optimize and correct the original model diagram of the bridge by using the data taken by the UAV, so as to obtain a more accurate and precise diagram.
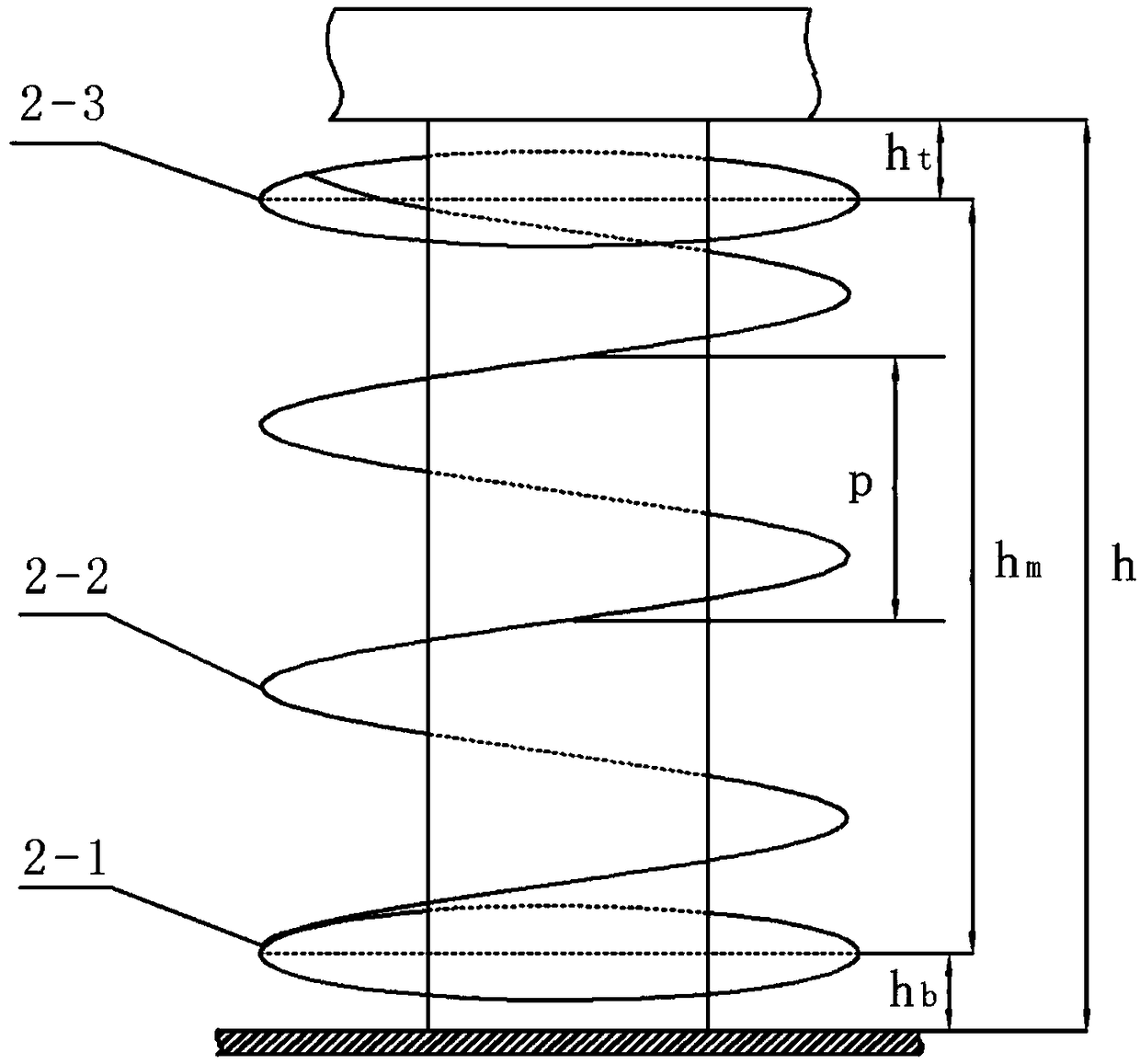
[0036] Step S2: Plan the cruising detection path of the UAV according to the three-dimensional coordinate model diagram, and divide the total length of the bridge column into the bottom area of the bridge column, the middle area of the bridge column, and the top area of the bridge column; the bottom area of the bridge column and the top a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com