

A 3D point cloud recognition method based on B-spline surface similarity detection
A spline surface, three-dimensional point cloud technology, applied in character and pattern recognition, instruments, computer parts and other directions, can solve problems such as cumbersome steps, limited application scenarios, and reduced recognition efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
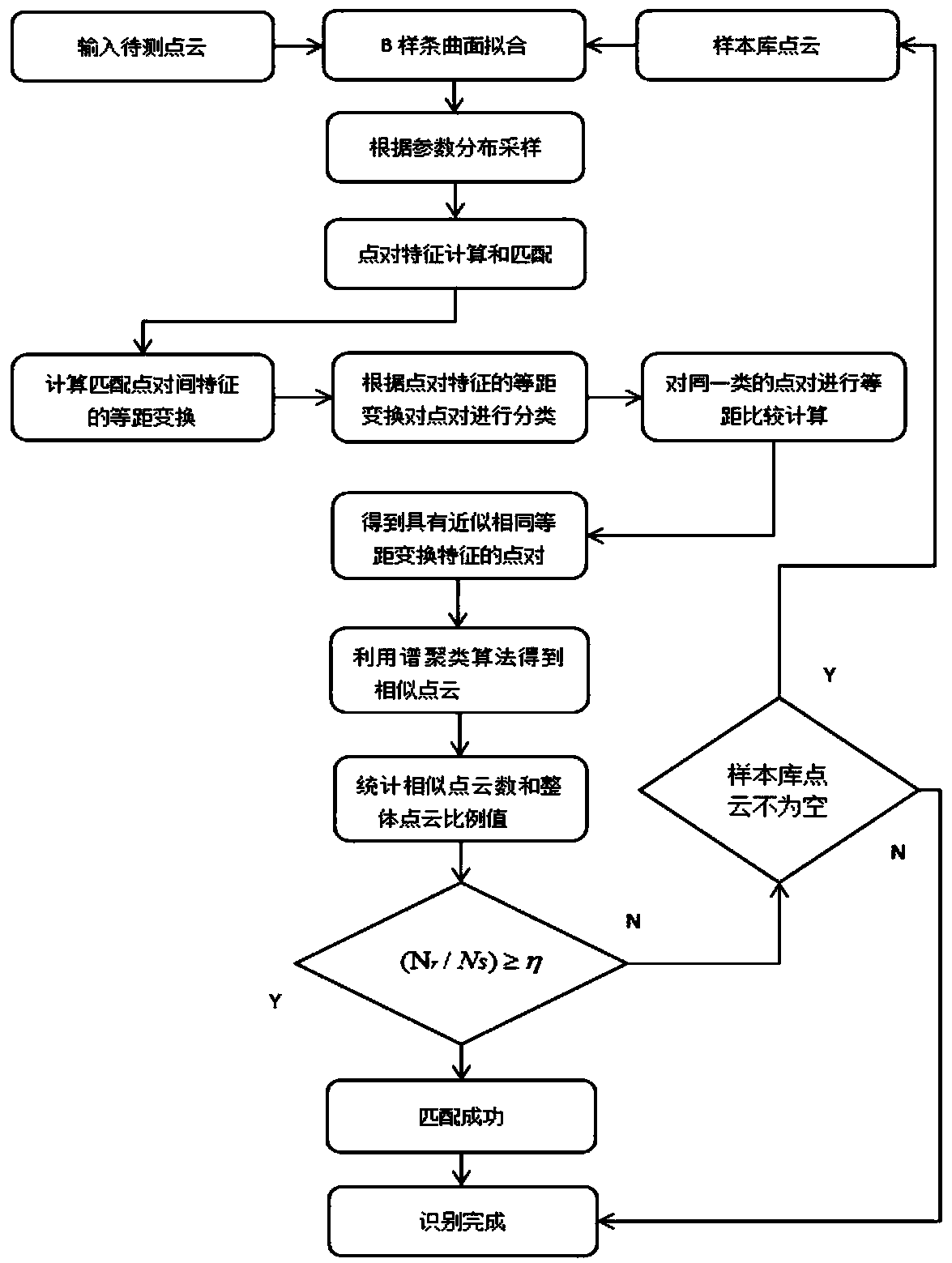
[0100] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
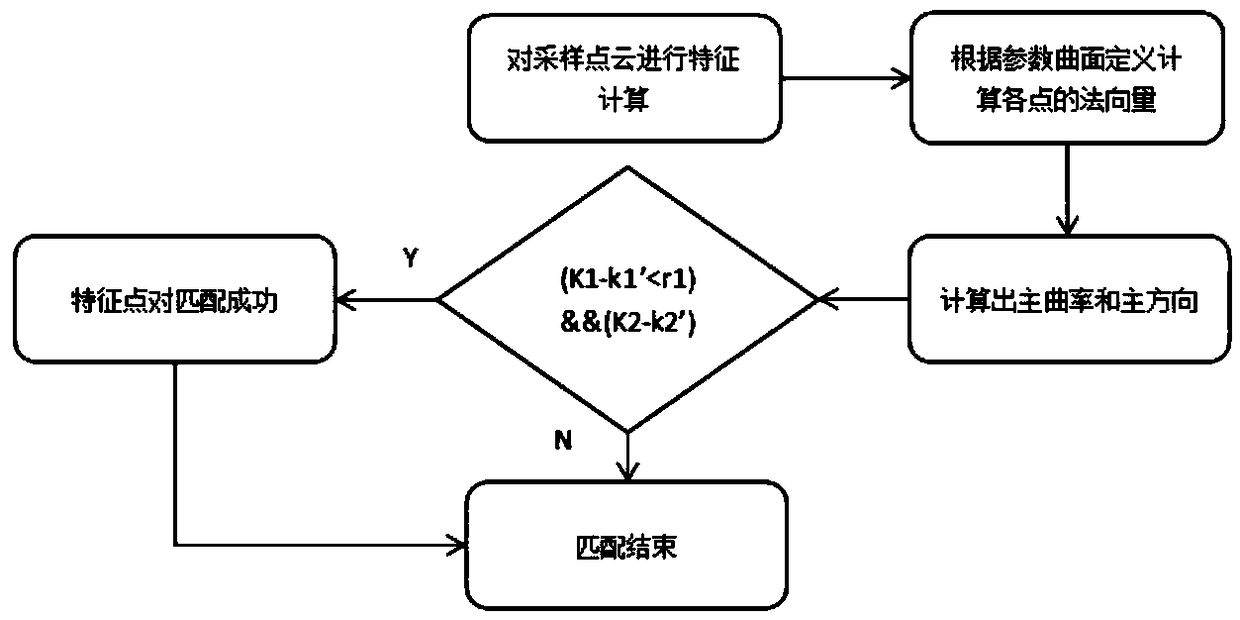
[0101] A three-dimensional point cloud recognition algorithm based on B-spline surface similarity detection, comprising the following steps:
[0102] Step 1, using the B-spline surface equation to model and fit the three-dimensional point cloud;
[0103] The concrete steps of described step 1 include:
[0104](1) Using B-spline surface equation to model the 3D point cloud;
[0105] Given control point C for B-spline parametric surface of degree K ij ,(i=0,1,2...m; j=0,1,2...n), the basis function recursion formula is obtained:
[0106]
[0107] It is stipulated that 0 / 0=0, node vector U=Ui (i=0,1,2...m+k+1), V=V j (j=0,1,2...n+k+1)
[0108] The surface equation can be obtained:
[0109]
[0110] Among them, the uniform node vector and the quasi-uniform node vector are taken in the same way as the curve, and the non-uniformity depends on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More