

Auxiliary ground robot navigation method and device based on unmanned aerial vehicle vision SLAM
A navigation method and technology of a navigation device, applied in the field of robotics, can solve the problems of limited mapping area, insufficiently precise mapping, high cost and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to clearly illustrate the solutions in the present invention, preferred embodiments are given below and detailed descriptions are given in conjunction with the accompanying drawings. The following description is merely exemplary in nature and is not intended to limit the application or uses of the present disclosure. It should be understood that throughout the drawings, corresponding reference numerals indicate like or corresponding parts and features.
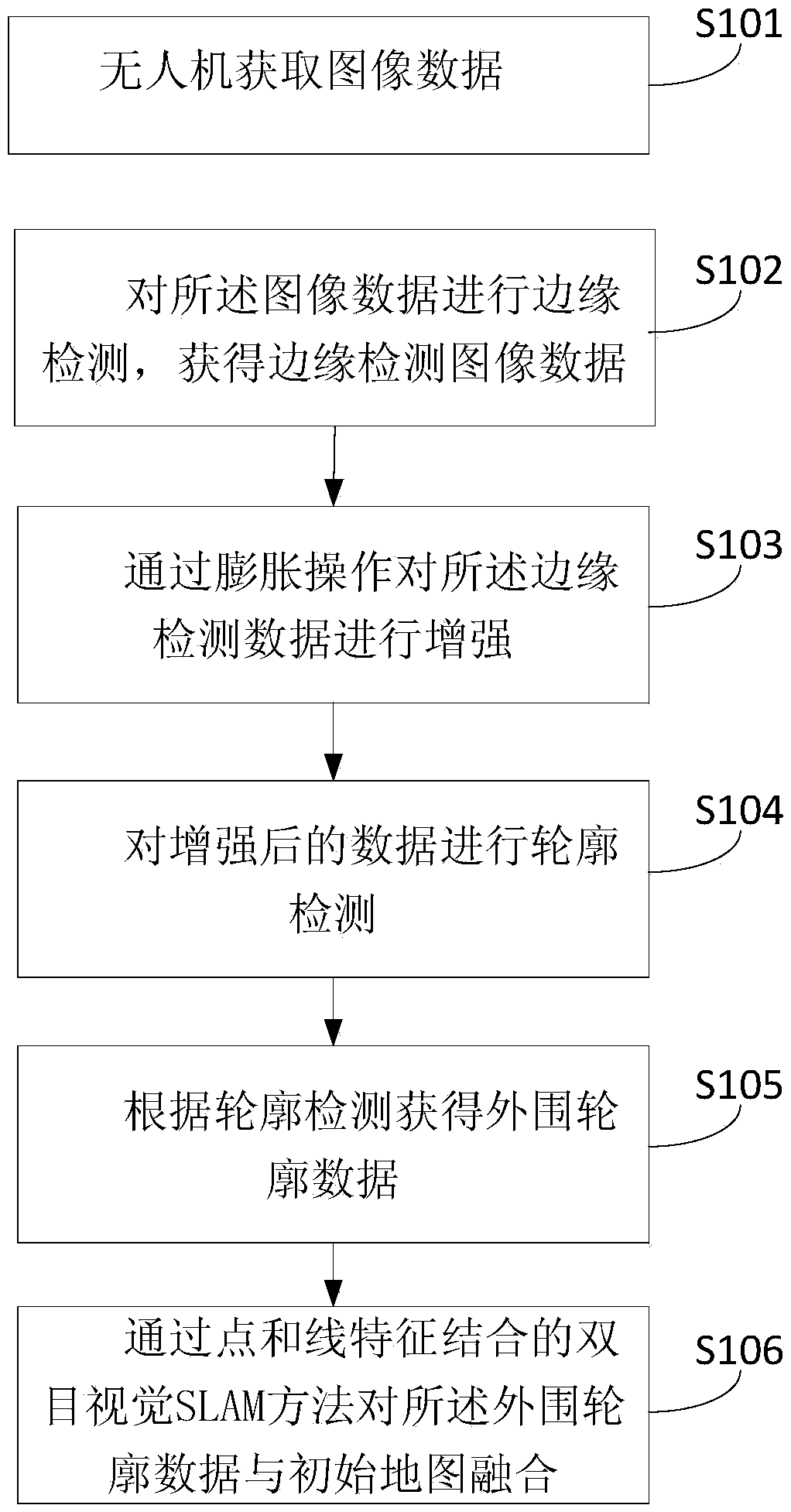
[0039] Such as figure 1 shown. A method for assisting ground robot navigation based on unmanned aerial vehicle visual SLAM, the method comprising:
[0040] S101, the UAV acquires image data;
[0041] S102. Perform edge detection on the image data to obtain edge detection image data; the edge detection is edge detection through a Canny operator.
[0042] The Canny operator is a kind of edge detection operator, which detects the edge of the object in the image, and the edge is the part of the local area of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More