

Front multi-vehicle tracking method integrating millimeter-wave radar and depth learning vision
A technology of millimeter-wave radar and deep learning, applied in the field of multi-target tracking, to achieve the effect of avoiding manual selection of features, strong expressive ability, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
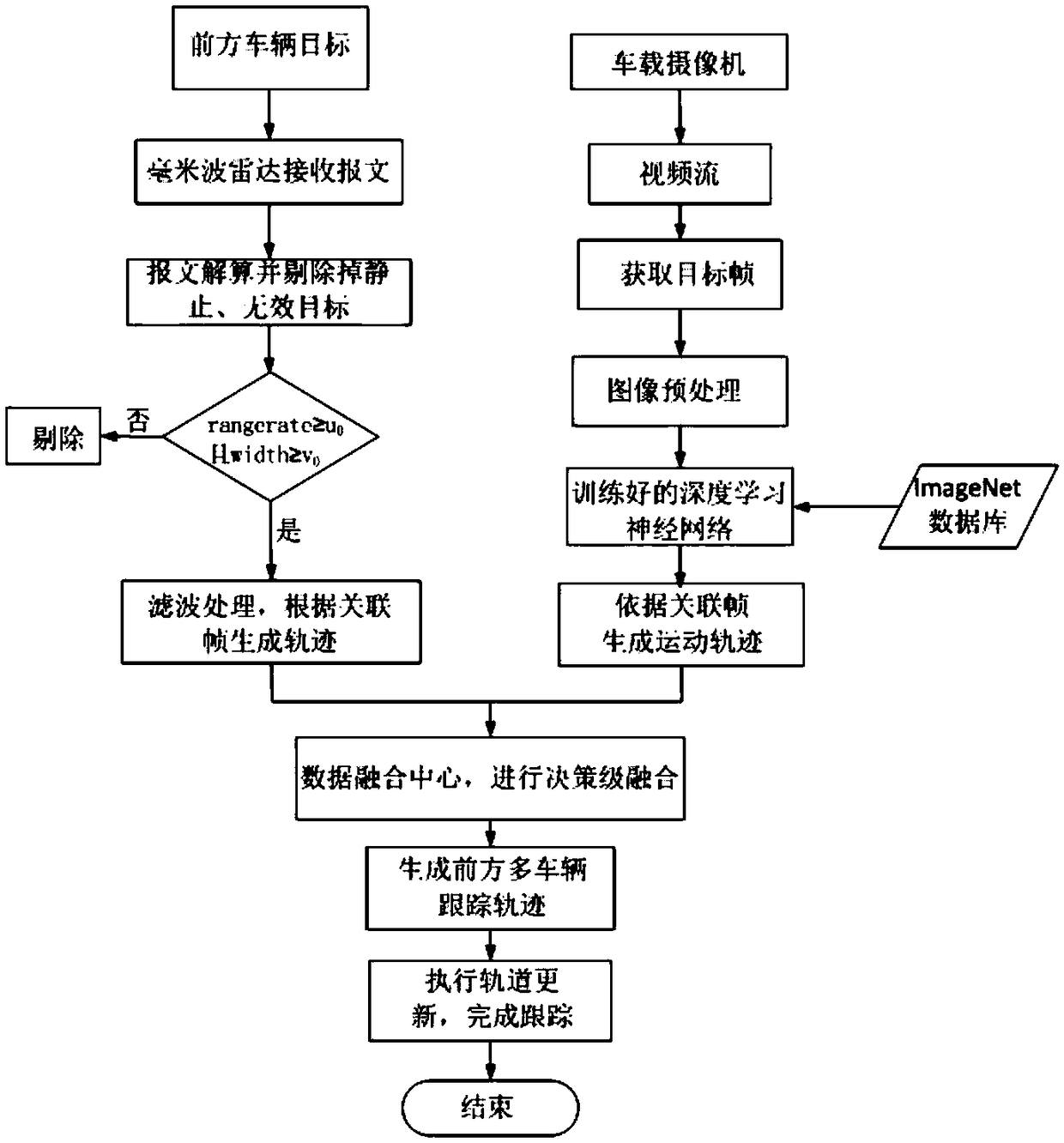
[0061] The present invention will be further described below in conjunction with accompanying drawing:
[0062] The multi-vehicle target tracking method in the field of automatic driving of the present invention integrates millimeter-wave radar and deep learning, and realizes the tracking of multi-vehicles in front. The present invention uses the millimeter-wave radar to obtain the front data information, including distance, angle, speed, reflection intensity and width information of the echo, and the like. According to the echo reflection intensity and width information of the obtained front data information, the information is eliminated, and the invalid information is eliminated, and only the vehicle information in front is retained. Then, according to the fusion method of millimeter-wave radar and deep learning (camera), through the filtering of radar information and the online tracking model to generate motion trajectories and perform trajectory correlation, the accuracy ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More