

Robot joint variable rigidity module based on cam type lever structure
A robot joint and cam type technology, applied in the field of robotics, can solve the problems of small stiffness adjustment range, large volume of variable stiffness rotary flexible joints, etc., achieve the effect of large stiffness adjustment range, flexible drive output, and reduce external impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
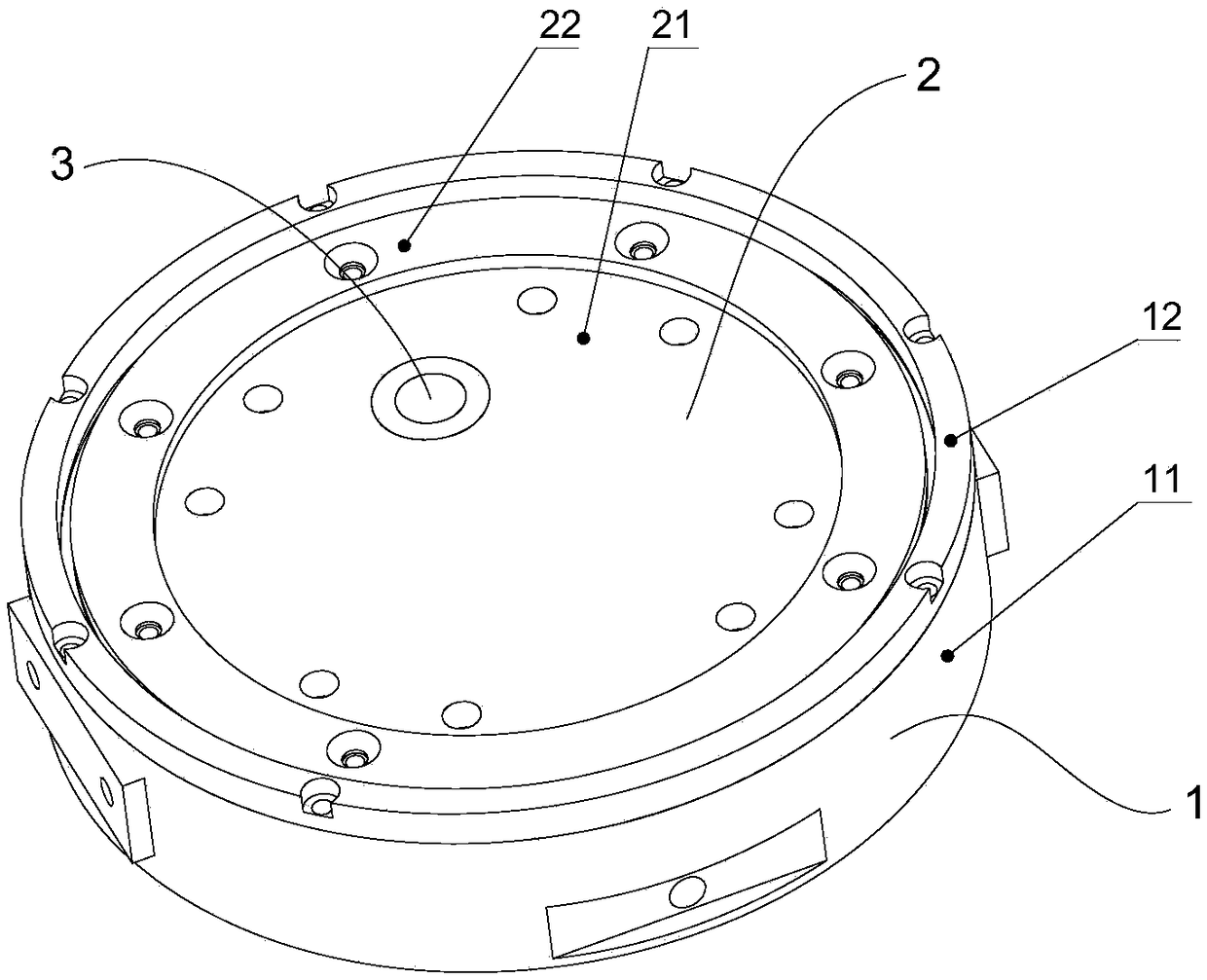
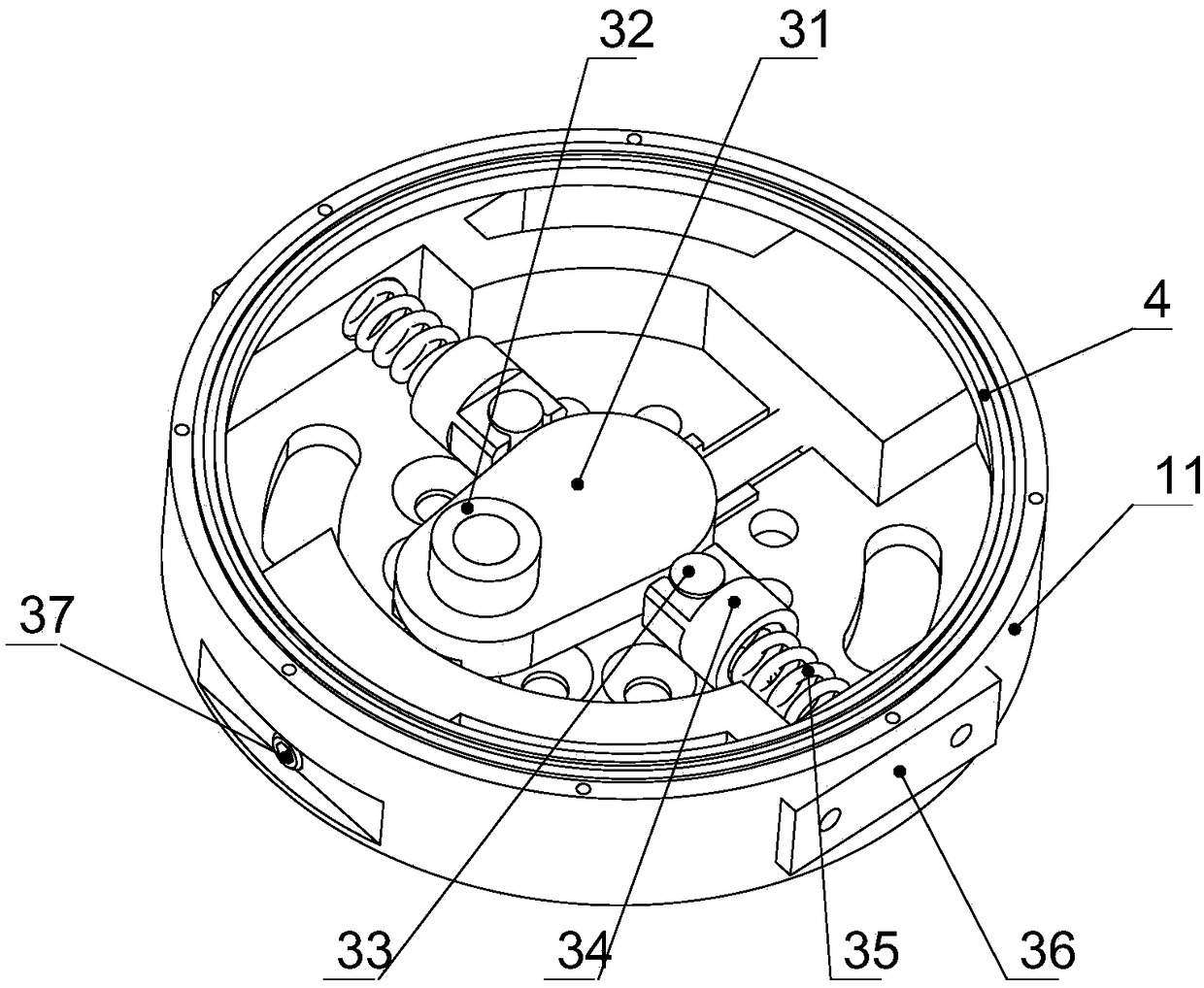
[0033] Such as Figure 1 to Figure 3 As shown, this embodiment discloses a robot joint variable stiffness module based on a cam-type lever structure. The variable stiffness module mainly includes an input part 1 , an output part 2 , and a stiffness adjustment part 3 . The output part 2 is arranged in the input part 1 . A bearing 4 is provided between the input part 1 and the output part 2 to bear the non-torque load of the whole module and make the input part 1 and the output part 2 relatively rotatable.
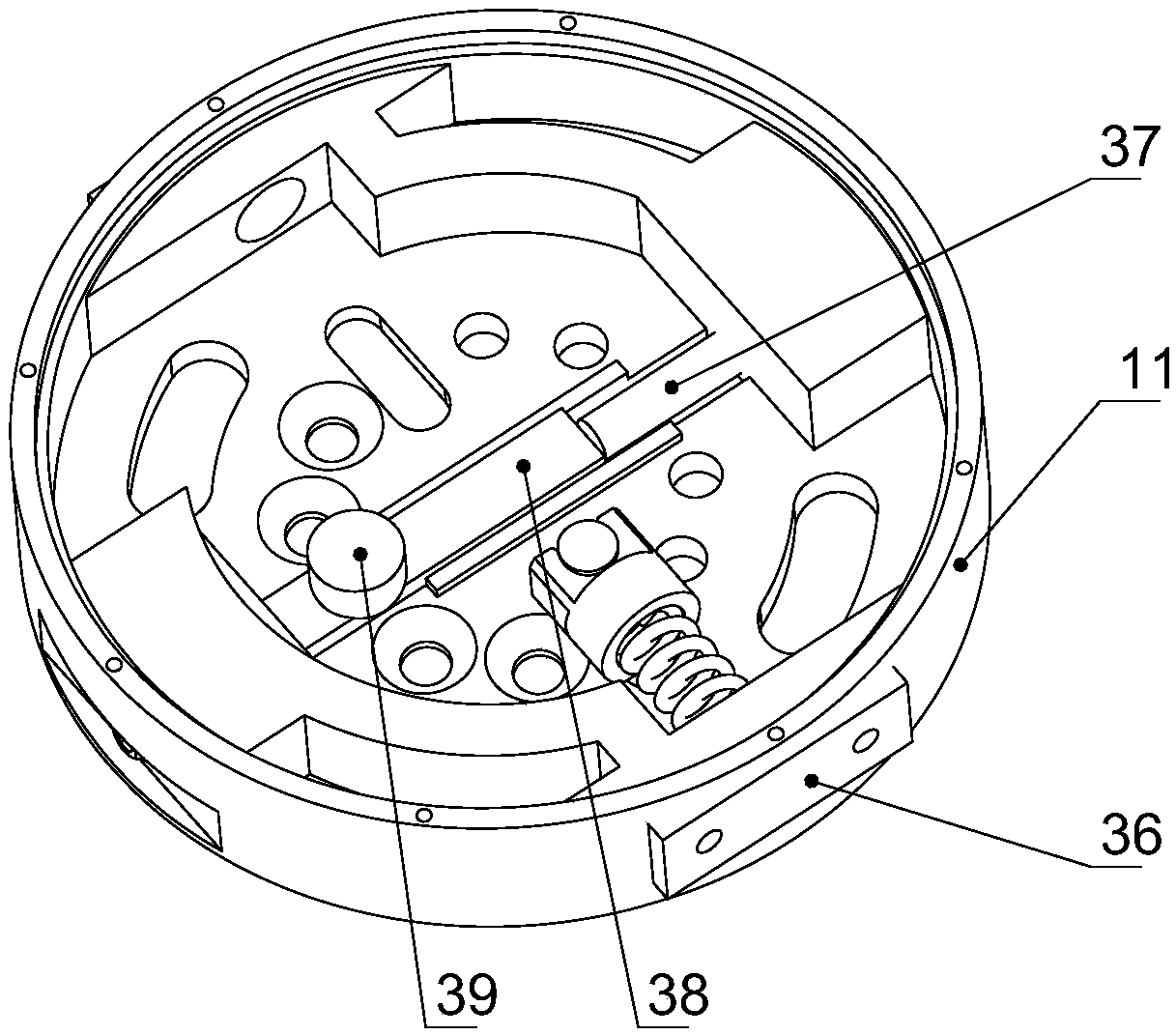
[0034] Specifically, the input part 1 includes a housing 11 and a retaining ring 12 for housing bearings. The casing bearing retaining ring 12 is arranged on the casing 11 and is fixedly connected with the casing 11 . The housing 11 is provided with guide grooves for constraining the compression spring 35 and constraining the rigidity adjustment fulcrum 39 . The guide groove is located at the bottom of the casing 11; the casing 11 is provided with necessary mounting holes...
Embodiment 2
[0044] Figure 1 to Figure 3 As shown, this embodiment discloses a robot joint stiffness variable module based on a cam-type lever structure, including an input part 1 , an output part 2 and a stiffness adjustment part 3 . The stiffness adjustment part 3 includes a compression spring 35, a cam lever 31 and a stiffness adjustment fulcrum 39; When the external load is loaded on the output disk 21 of the variable stiffness module, it is transmitted to the compression spring 35 through the action of the cam lever 31. At this time, the compression spring is compressed under the action of the external force and the cam lever 31 is deflected by an angle. The output disk 21 is finally deflected due to the change of the angle of the cam lever 31 . This process is equivalent to when the variable stiffness module is subject to a certain torque load, especially some sudden loads, the compression spring 35 will produce a corresponding force to resist the sudden change of the load through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More