A joint control method for cooperative high-altitude and long-endurance UAVs
A technology for connecting control and unmanned aerial vehicles, applied in the field of control, to achieve the effect of increased flight range and uniform energy distribution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
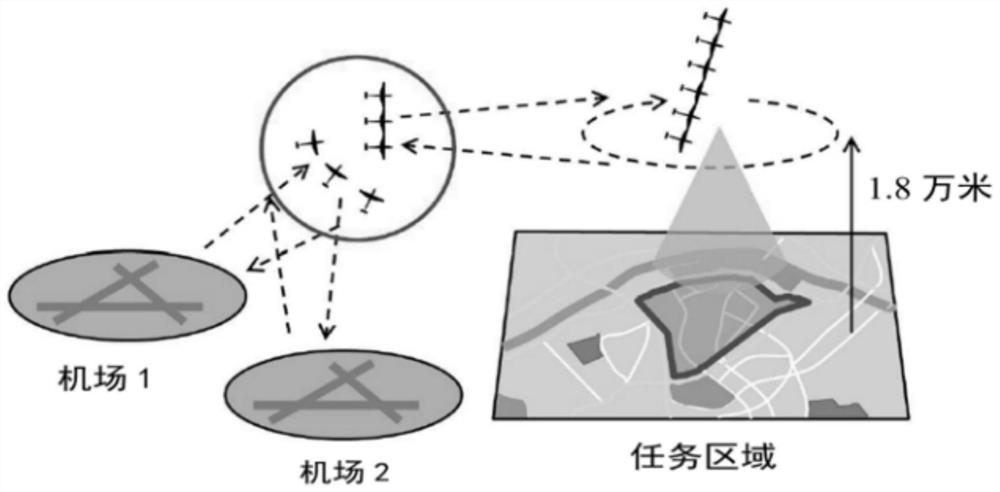
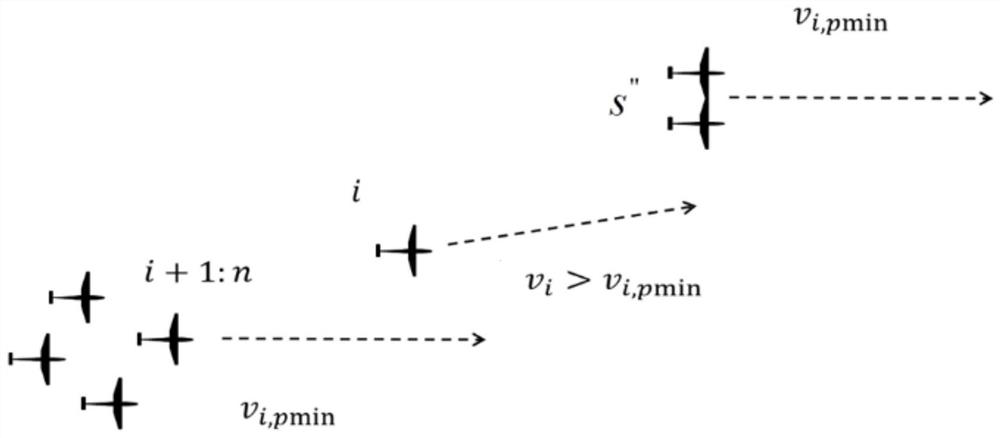
[0065] Cooperative high-altitude and long-term endurance includes control and coordination issues, and further research is required on cooperative control, path planning of small and low-efficiency UAVs, and autonomy of UAVs. Unlike dispersed formation flying, the use of a coordinated high-altitude long-endurance system requires the development of a formation control method for UAV rendezvous and connection. The method of the invention develops a UAV coordination mechanism for the distributed action of the UAV, and proposes an energy-saving flight control strategy in which multiple UAVs are connected sequentially under the condition of ignoring the wind force. The specific steps of the control method for cooperative high-altitude and long-endurance UAV connection are as follows:
[0066] Step 1: Establish a high-altitude long-endurance UAV motion model
[0067] The system motion equation of the high-altitude long-endurance UAV relative to the ground motion model is as follows...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More