

Mechanical arm control method and mechanical arm
A control method and technology of robotic arms, which are applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as collisions and the inability of safe working ranges to meet actual needs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific implementation manner of the present invention will be described in more detail below with reference to schematic diagrams. The advantages and features of the present invention will be more apparent from the following description. It should be noted that all the drawings are in a very simplified form and use imprecise scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
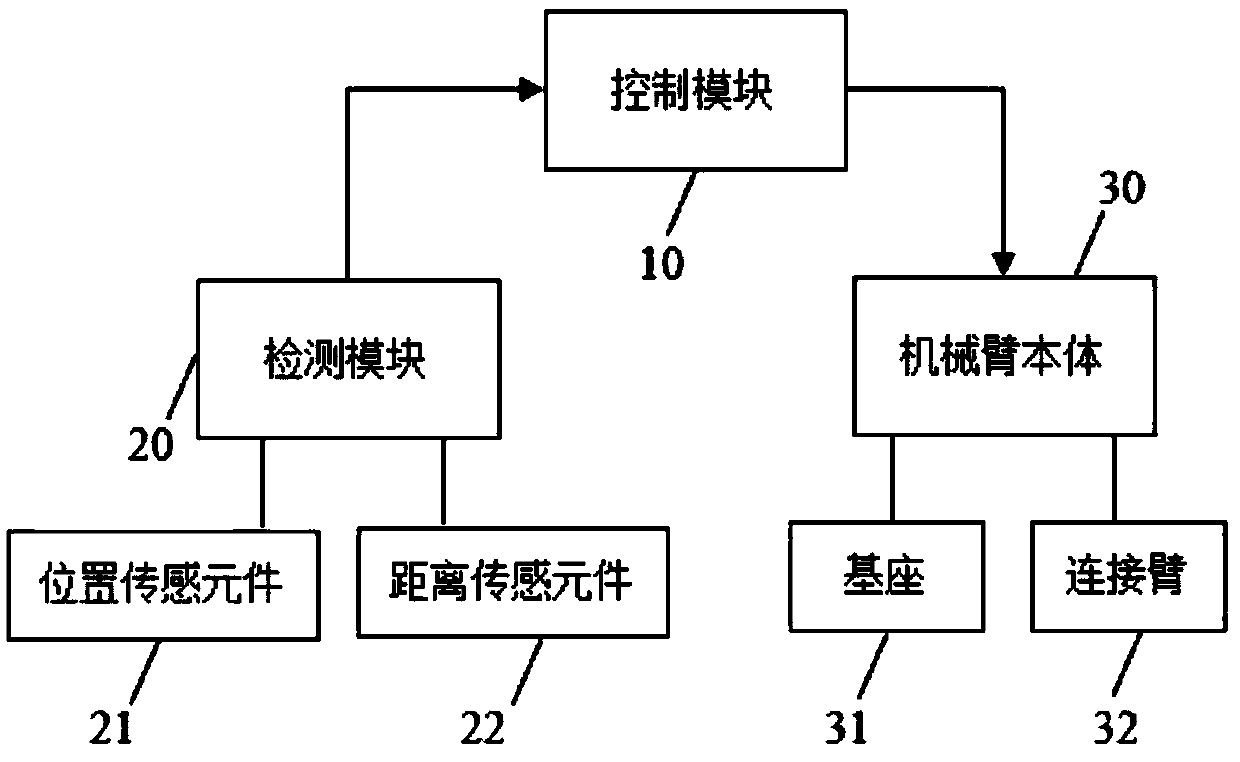
[0043] like figure 1 As shown, the present invention provides a robotic arm, including a control module 10, a detection module 20 and a robotic arm body 30, the detection module 20 is used to detect the current pose information of the robotic arm body 30, and the control module 10. Adjust the pose of the robotic arm body 30 according to the pose information, so that the robotic arm body 30 adapts to the current installation state.
[0044] Further, the detection module 20 is also used to detect obstacles within t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More