

Underground unmanned trackless rubber-tyred vehicle with infrared top tracking and its driving control method
A trackless rubber-tyred vehicle, driving control technology, applied in two-dimensional position/channel control, vehicle position/route/height control, control/adjustment system, etc. Problems such as large positioning deviations can achieve the effect of prolonging the rescue time, reducing the workload of workers, and reducing the accident rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below with reference to the accompanying drawings.
[0038] Next, the technical solutions in the embodiments of the present invention will be apparent from the embodiment of the present invention, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
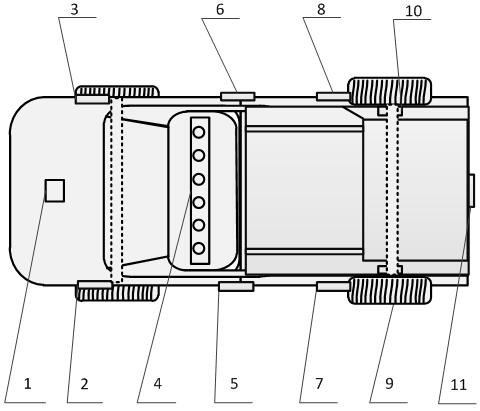
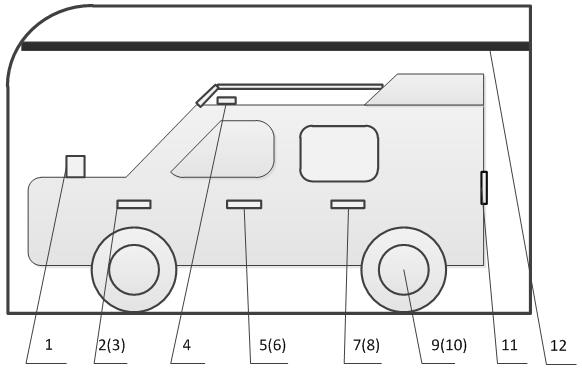
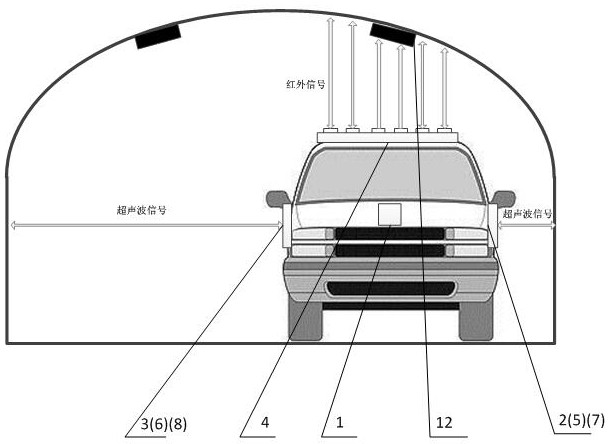
[0039] like figure 1 , figure 2 and image 3 As shown, the present invention includes a perceptual system, a control system, an execution system, and a body;
[0040] The perceptual system includes a laser radar sensor 1, a first left ultrasonic sensor 2, a first right ultrasonic sensor 3, an infrared sensor 4, a second left ultrasonic wave sensor 5, a second right ultrasonic sensor 6, a third left ultrasonic sensor 7,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More