

Posture information determination method and apparatus, visual point cloud construction method and apparatus
A technology of pose information and determination method, applied in the field of computer vision, can solve the problems of complex calibration, large cost impact, high production cost, and achieve the effect of reducing deployment difficulty, sensor cost and computing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Hereinafter, exemplary embodiments according to the present application will be described in detail with reference to the accompanying drawings. Apparently, the described embodiments are only some of the embodiments of the present application, rather than all the embodiments of the present application. It should be understood that the present application is not limited by the exemplary embodiments described here.
[0019] Application overview
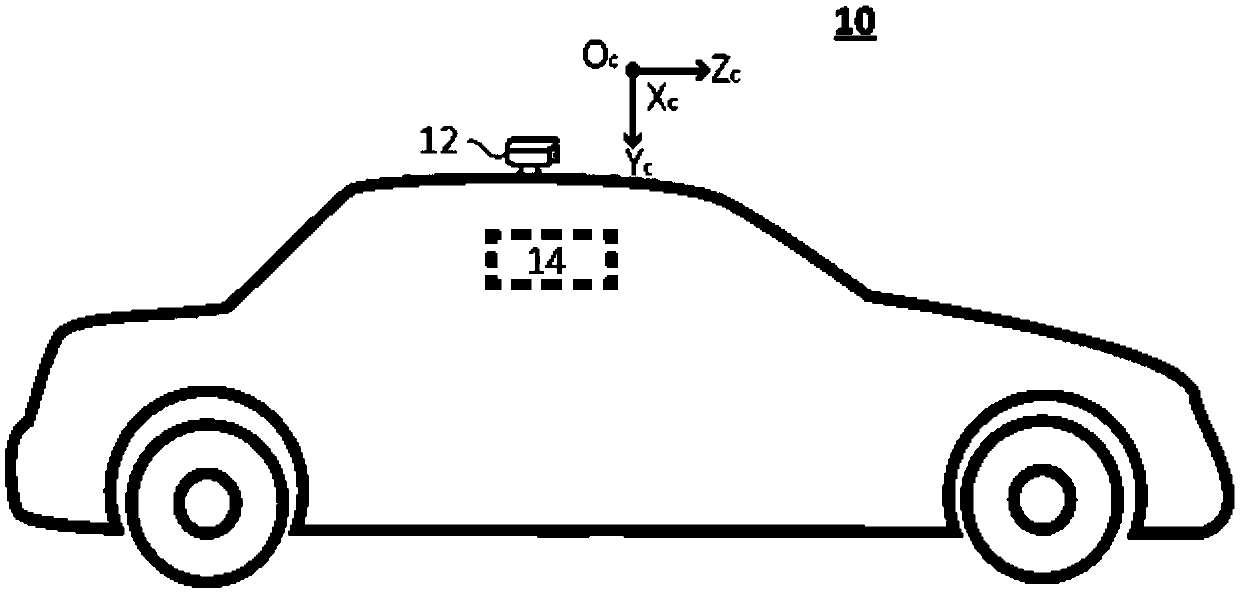
[0020] As mentioned above, in unmanned driving, the pose information of the camera and the calculation of the current position of the camera are very important. However, in order to obtain accurate pose information and current position of the camera, the cost is relatively high. Therefore, there is a need for an improved method for determining pose information, so that the cost of obtaining accurate pose information of the camera can be reduced.
[0021] Aiming at this technical problem, the basic idea of this application i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More