

Immersion boundary control method used for underwater obstacle avoidance of multi-joint snake-like robot
A snake-like robot and boundary control technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as long calculation time, complex solutions, and inability to explain the movement of fluid motion particles, etc., to achieve parallel realization and simple calculation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
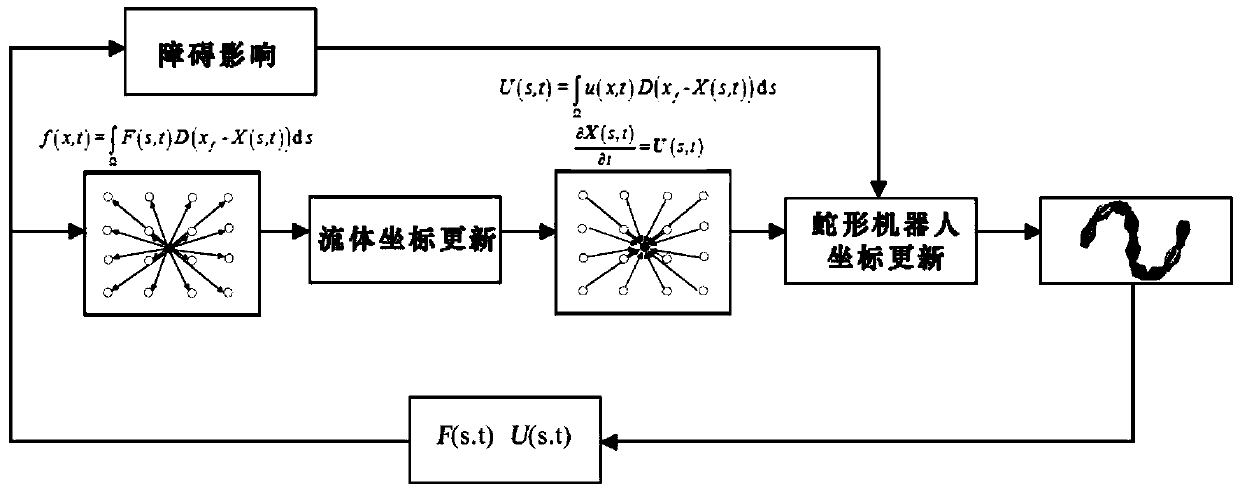
[0047] This embodiment discloses an immersion boundary control method for a multi-joint snake-like robot to avoid obstacles underwater. The flow chart is as follows: figure 1 As shown, the specific implementation steps are as follows:
[0048] Step 1: In order to solve the problem that solving the Navier-Stokes equation cannot explain the mutually exclusive theories such as fluid motion, particle motion, and random motion, starting from the perspective of probability and statistics, without considering molecular collisions, within the time Δt, get The continuous lattice Boltzmann equation satisfies formula (1), and then the continuous lattice Boltzmann equation is discretized, and a simple operator Ω is introduced i (f i ) to replace the collision function, the nonlinear discrete lattice Boltzmann equation is obtained, which satisfies the formula (2),
[0049] f i (x+Δx,ζ+aΔt,t+Δt)dxdζ=f i (x,ζ,t)dxdζ (1)
[0050] f i (x+e i Δx,t+Δt)-f i (x,t)=Ω i (f i )+Δt·G i (2)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More