
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Spiral robot capable of moving on curved surface in cavity
A technology of helical robot and inner surface, applied in the field of robots, can solve problems such as jamming, the robot cannot work normally in the pipeline, and the pipeline robot cannot move forward, and achieves the effect of wide application range and smooth fluctuation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
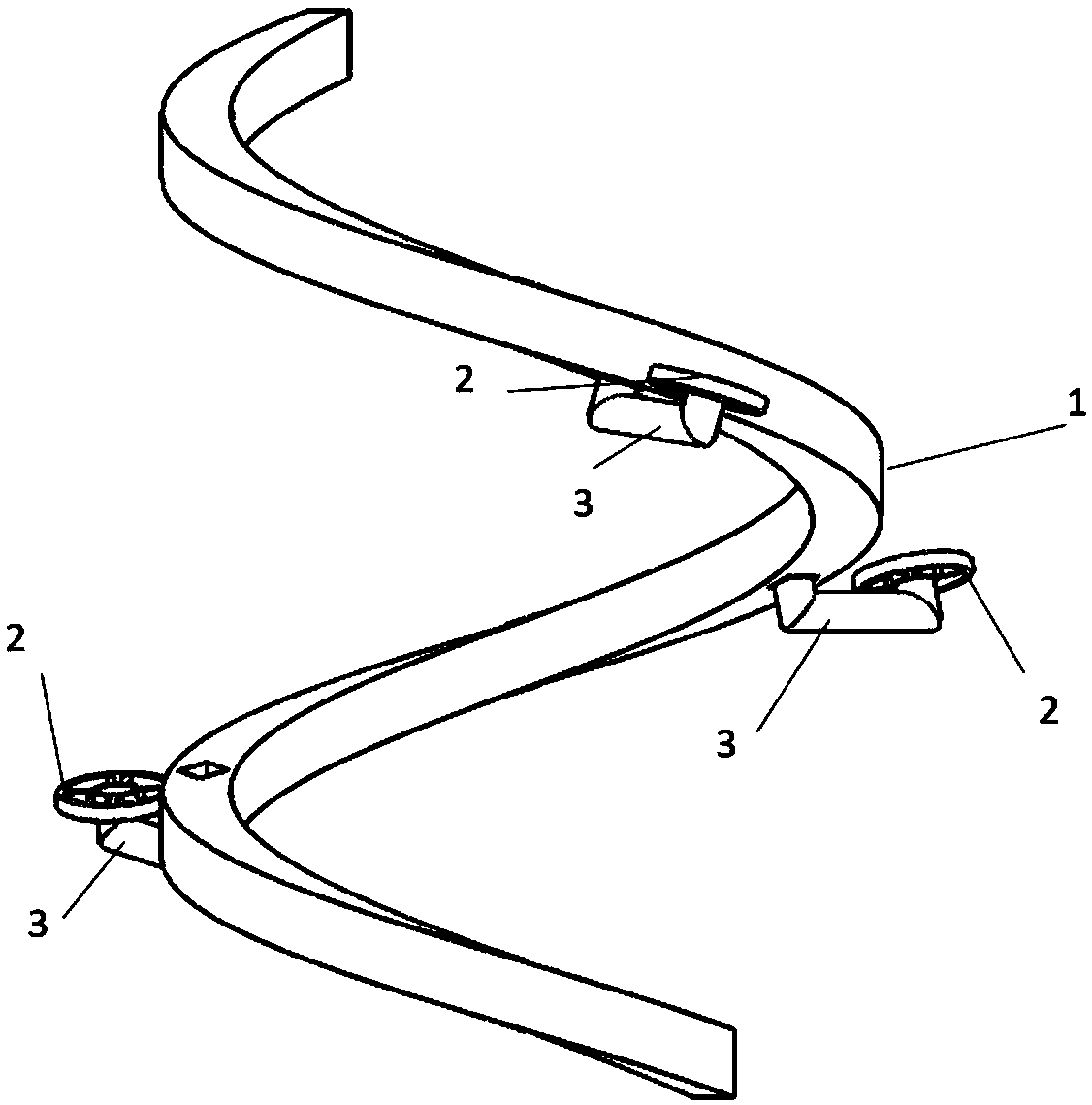
[0041] This example is a three-wheeled spiral robot, the structure of the robot is as follows: Figure 10shown. The structure is composed of a spiral body 1, three action wheels 2, elastic devices and other structures. The length of the spiral body 1 of the robot is between 1 and 2 turns, and 1.5 turns is a moderate length. The appropriate pitch and thickness of the body 1 can ensure that the gap can pass through obstacles; the three action wheels 2 are evenly placed on the body 1, an action wheel 2 is installed every 120 degrees in the direction of the pipe section plane; the installation direction of the action wheel 2 is along the helix direction where the spiral body 1 is located, and each action wheel 2 is driven by a motor. The action wheel 2 is connected with the body 1 through an elastic device. The action wheel 2 has a certain suspension device. The compression direction of the suspension device is from the axial center of the pipeline to the inner wall of the pipeli...
Embodiment 2
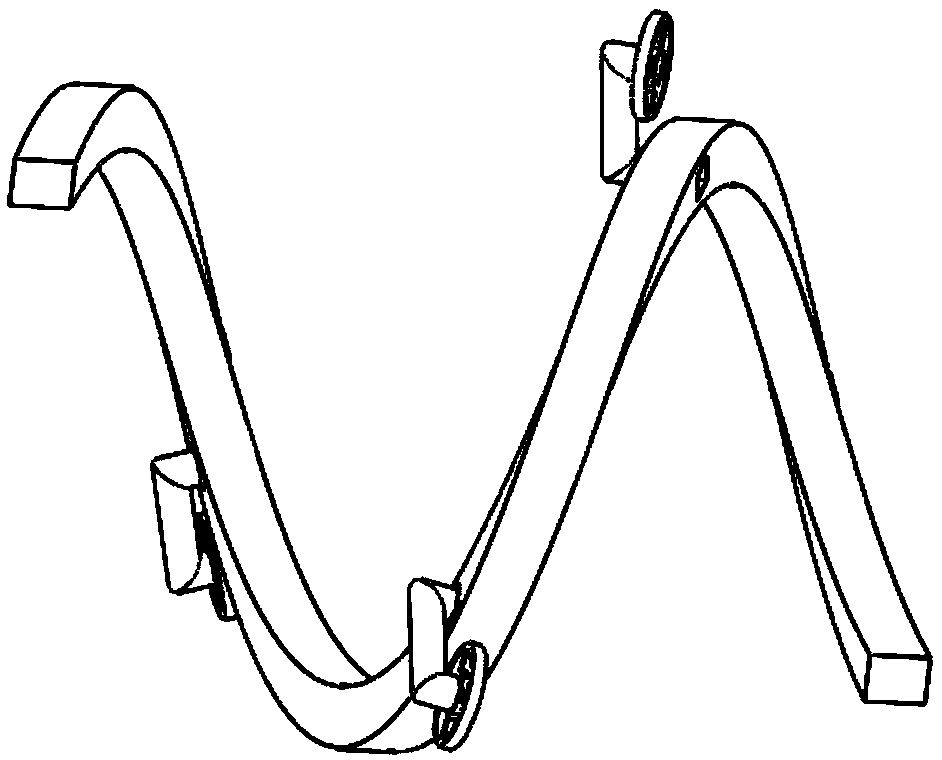
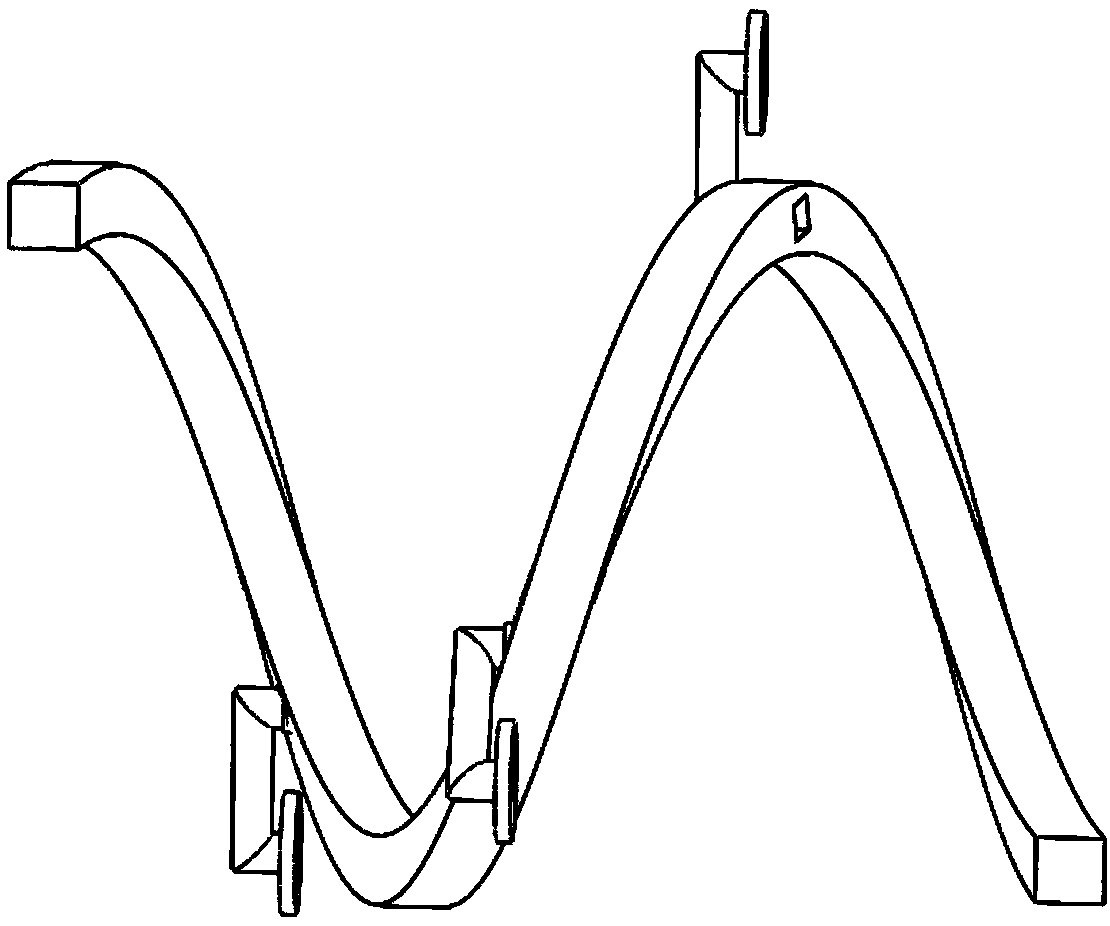
[0044] This example is a six-wheel spiral robot, the structure of the robot is as follows Figure 11 shown. The structure is composed of a spiral body 1, six action wheels 2, connecting devices 3 and other structures. The length of the spiral body 1 of this robot is between 1 and 2 turns, and 1.5 turns is a moderate length, and suitable pitch and body 1 thickness can allow this gap to ensure passing through obstacles. The six action wheels 2 are divided into two groups AB. When the motor drives the action wheels 21 of group A to move, the robot can move forward and backward in the pipeline. The action wheels 22 of group B are installed flat. When the motor drives the action wheels 22 of group B When moving, the robot can rotate in place in the pipeline, and at this time, the robot only rotates but does not move forward or backward. The body 1 of the robot itself is elastic. In a relaxed state, the diameter is slightly about the inner diameter of the pipe. After being compres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com