

Online self-learning method for a robot autonomous object pickup task
A self-learning method and robot technology, applied in the field of robot self-learning, can solve problems such as complex environmental backgrounds and mutual positional relationships, and achieve the effect of increasing versatility and reducing the difficulty of application and promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
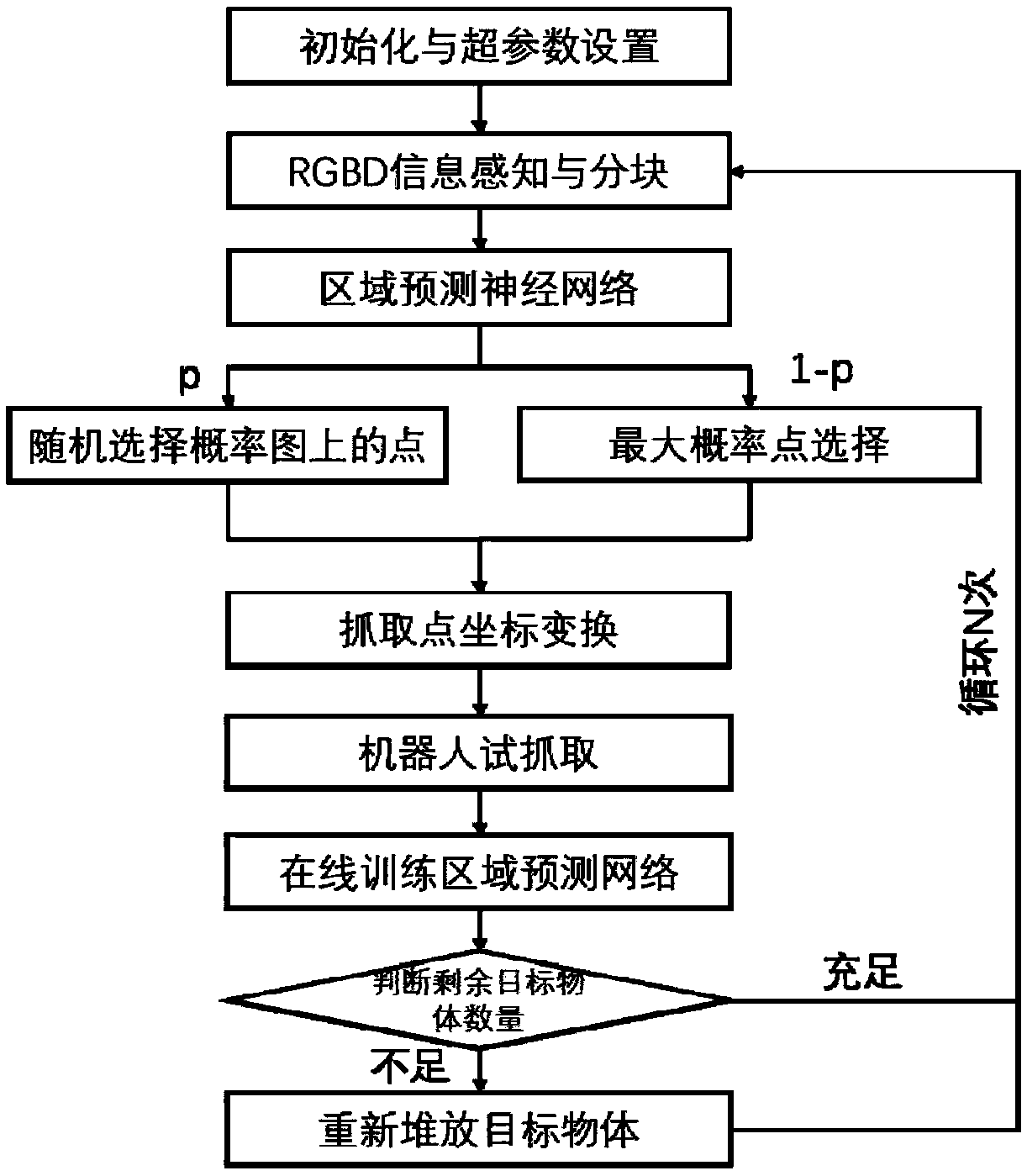
[0029] The present invention provides an online self-learning method for robot autonomous object picking tasks. In a preferred example, the corresponding robot system hardware includes an RGBD camera, a six-degree-of-freedom industrial mechanical arm equipped with a vacuum suction cup, and scattered and stacked objects to be picked up. Place the RGBD camera above the target object, the camera field of view is downward, and the RGBD camera and the industrial robot arm determine the coordinate transformati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More