

Multi-structural-state soft gripper
A soft body and configuration technology, applied in the field of manipulators, can solve problems such as inconvenience, and achieve the effect of improving versatility, improving grasping ability, and soft material
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
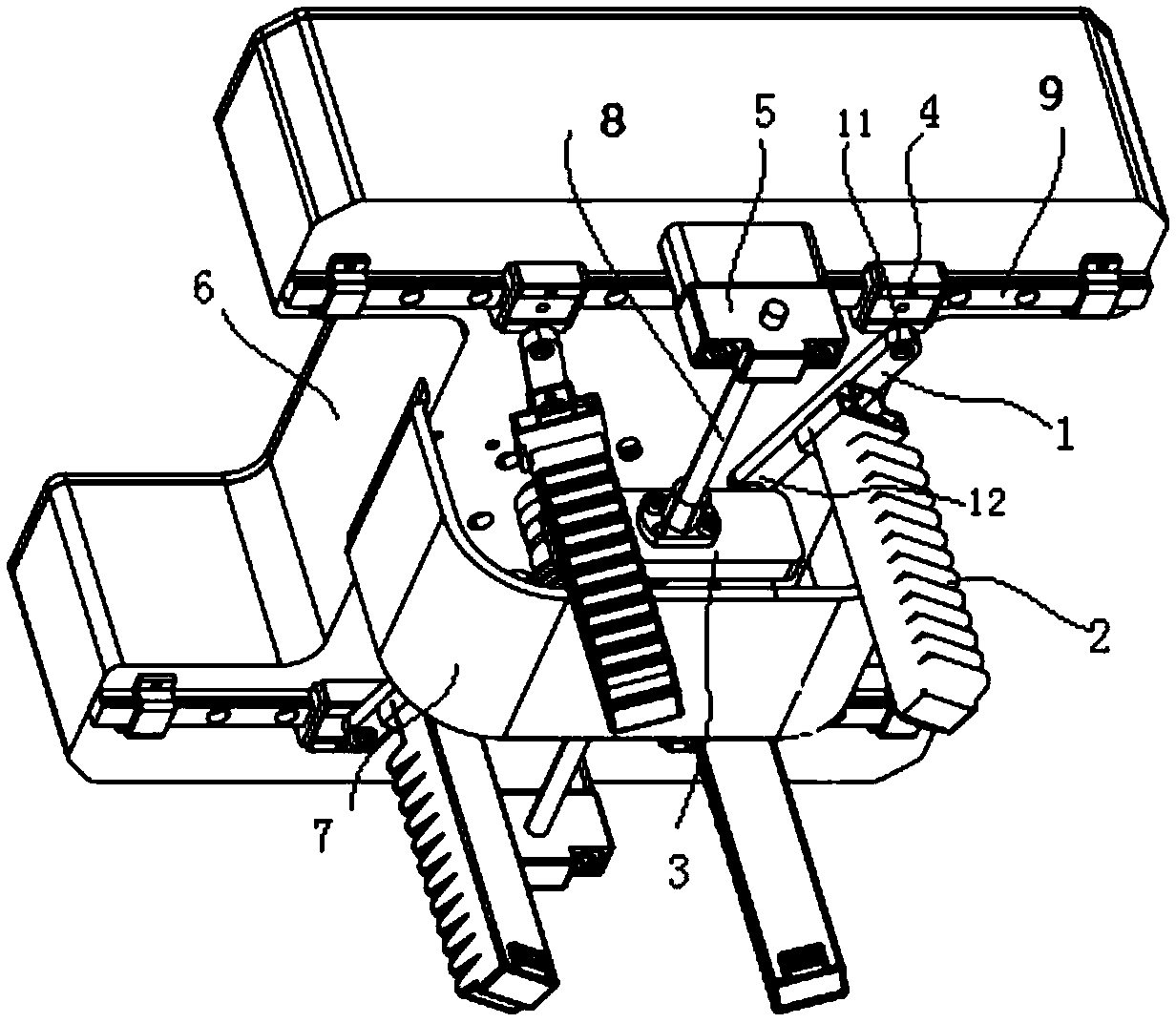
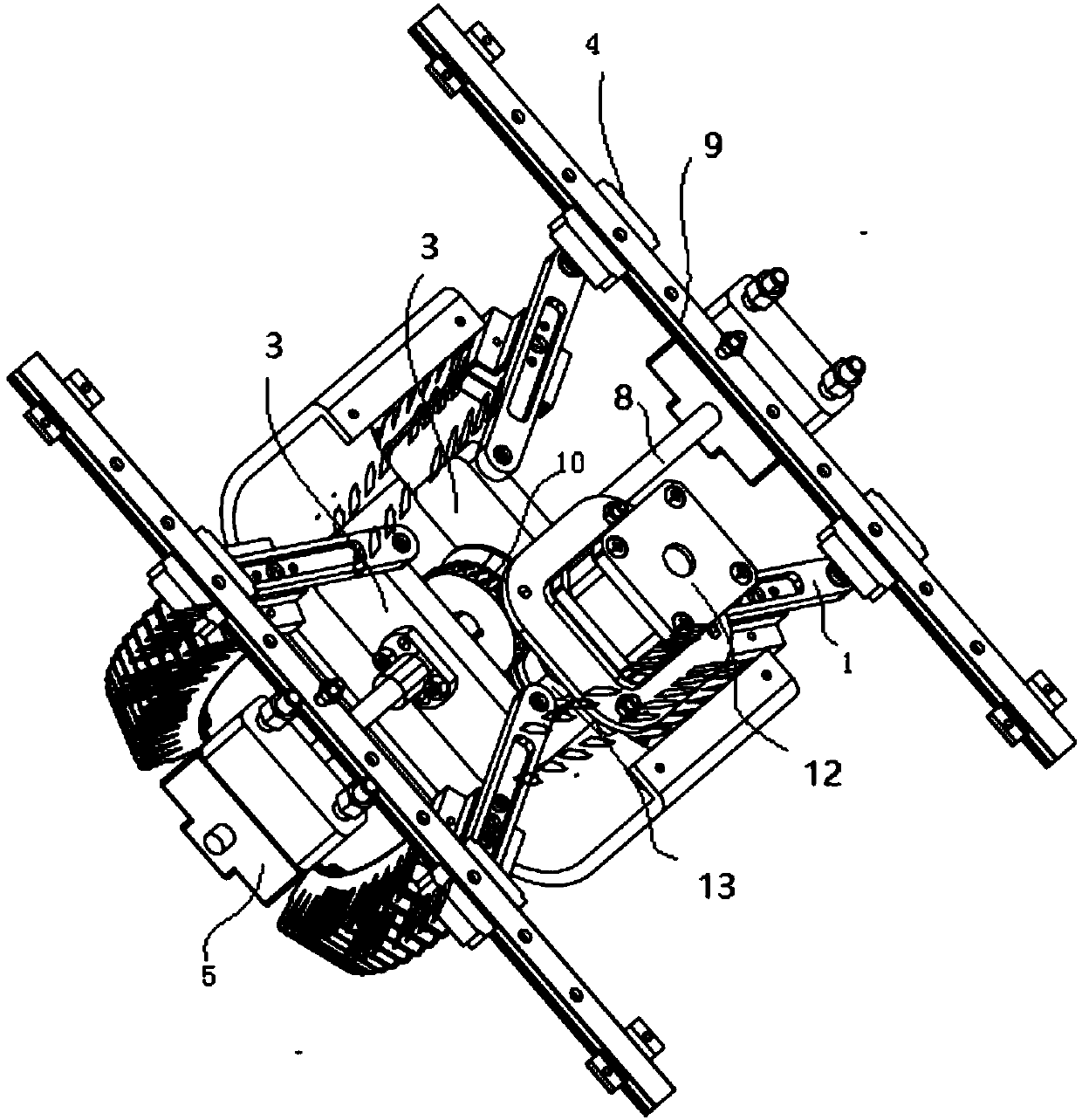
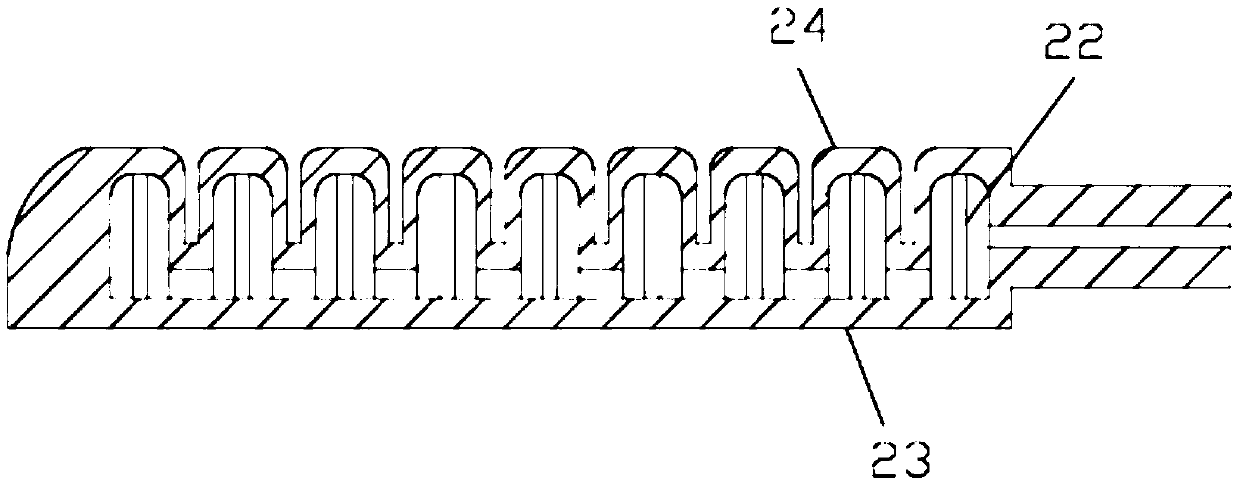
[0021] figure 1 It is a structural schematic diagram of this embodiment, figure 2 It is a schematic diagram of the internal structure of this embodiment, image 3 It is a schematic diagram of the internal structure of the finger. A multi-configuration soft gripper of the present invention includes an actuator body 6, at least two reciprocating swing rods 1 arranged on the actuator body 6, and a device for driving the swing rods 1 to swing. The driving device, the swing rod 1 is fixedly connected with the fingers 2 that grasp or loosen when the swing rods 1 approach or move away from each other. The swing rod 1 swings as a whole. Since the finger 2 is fixed on the swing rod 1, it drives the finger 2 to move to achieve grasping, which can realize the grasping task under the variable load environment and improve the grasping stiffness of the end effector. The grasping performance of the gripper is also improved, and the structure of the scheme is simple, and the grasping of ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More