

Autonomous mobile robot navigation method comprehensively adopting artificial road signs and grid map
A mobile robot and grid map technology, applied in the field of mobile robots, can solve problems such as high cost and complex implementation methods, and achieve the effects of improving accuracy, low cost, and improving stability and reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
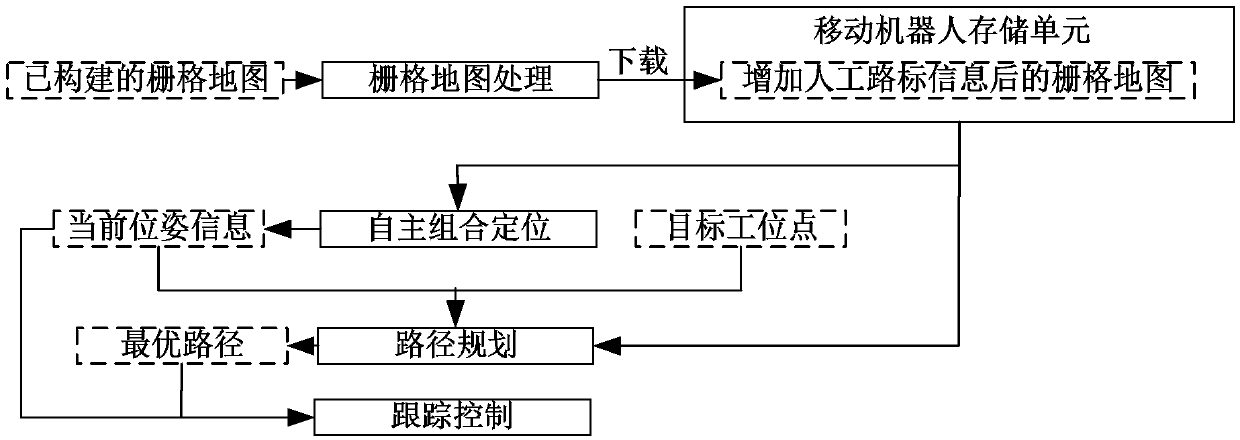
[0028] The present invention proposes a mobile robot autonomous navigation method that comprehensively applies artificial landmarks and grid maps, and its flow is as follows: figure 1 shown, including steps:
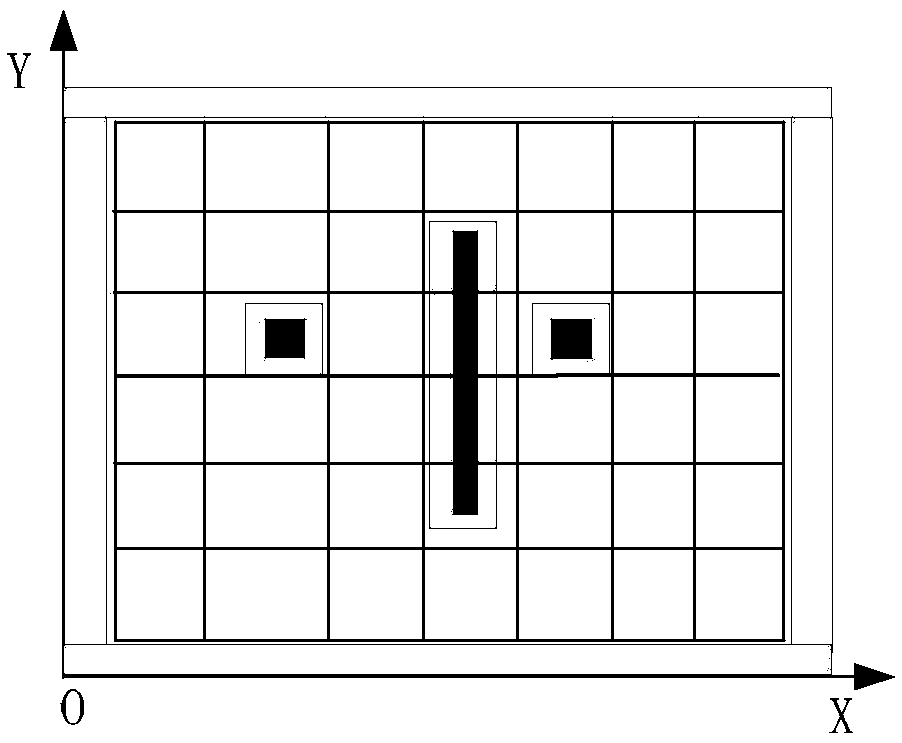
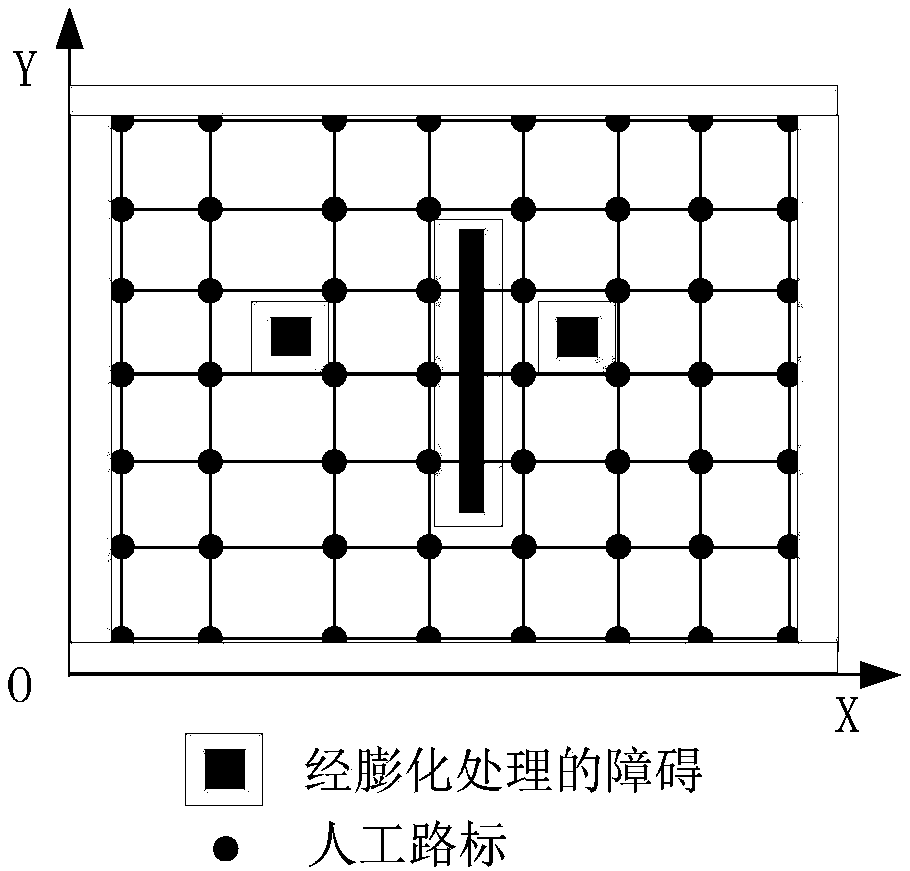
[0029] (1) Grid map preprocessing: obtain the grid map, and expand the obstacles in the grid map;
[0030] (2) Artificial landmarks are set on the grid points of the preprocessed grid map, and the artificial landmarks store their own coordinates, orientation and the distance between themselves and adjacent grids, and the artificial landmarks store the Data can be read by mobile robots;
[0031] (3) The mobile robot downloads the grid map, obtains the obstacle position information and the artificial landmark position information in the grid map; the mobile robot obtains the target station specified by the system task, and uses the grid point closest to the curre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More