

Robot space trajectory transition method
A robot and trajectory technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reducing robot trajectory accuracy, reducing robot production efficiency, and robot operation jitter, so as to improve operating efficiency, improve motion stability, and speed smooth effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, wherein the schematic embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
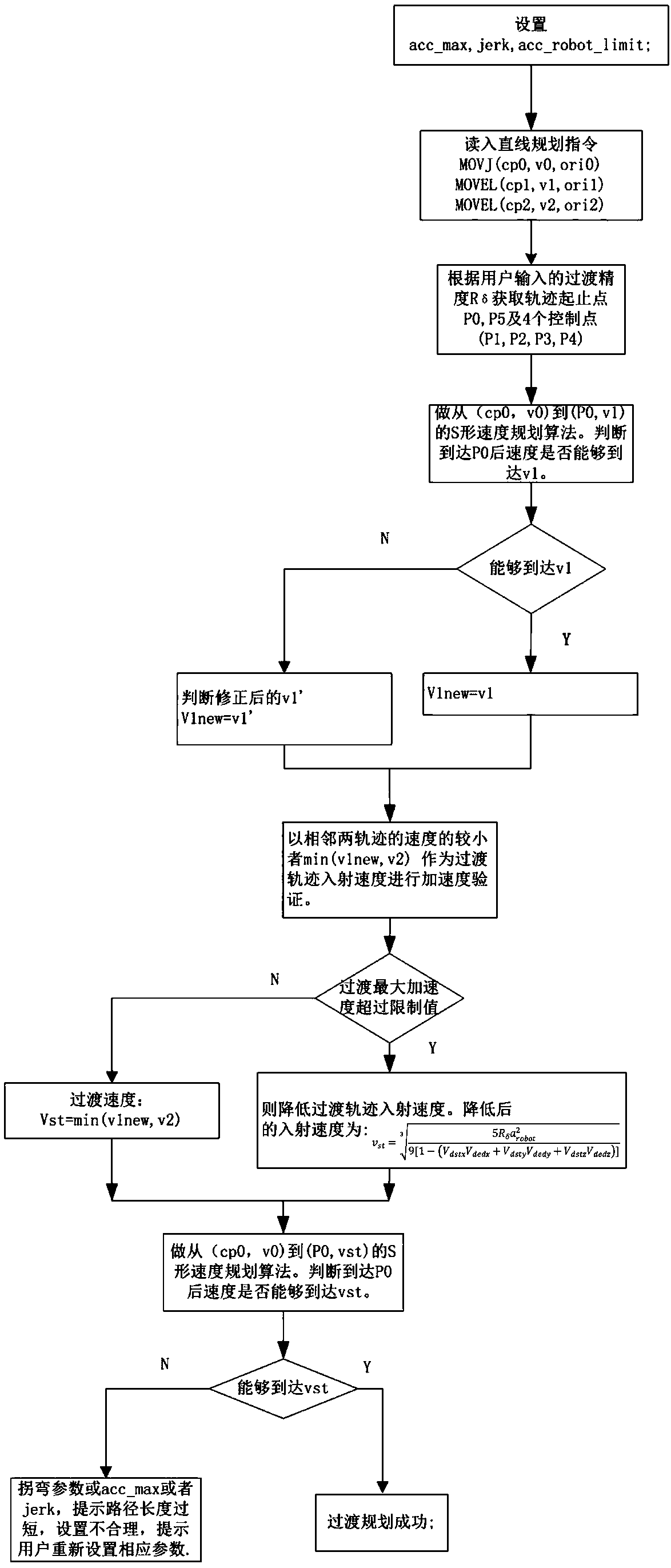
[0039] See attached figure 1 , which shows a schematic flow diagram of the method of the present invention, the specific steps of the method are described as follows:
[0040] Step S1: Set the maximum acceleration acc_max, the jerk jerk, and the acceleration upper limit value a for acceleration verification during the S-shaped speed planning of the robot robotLimit .
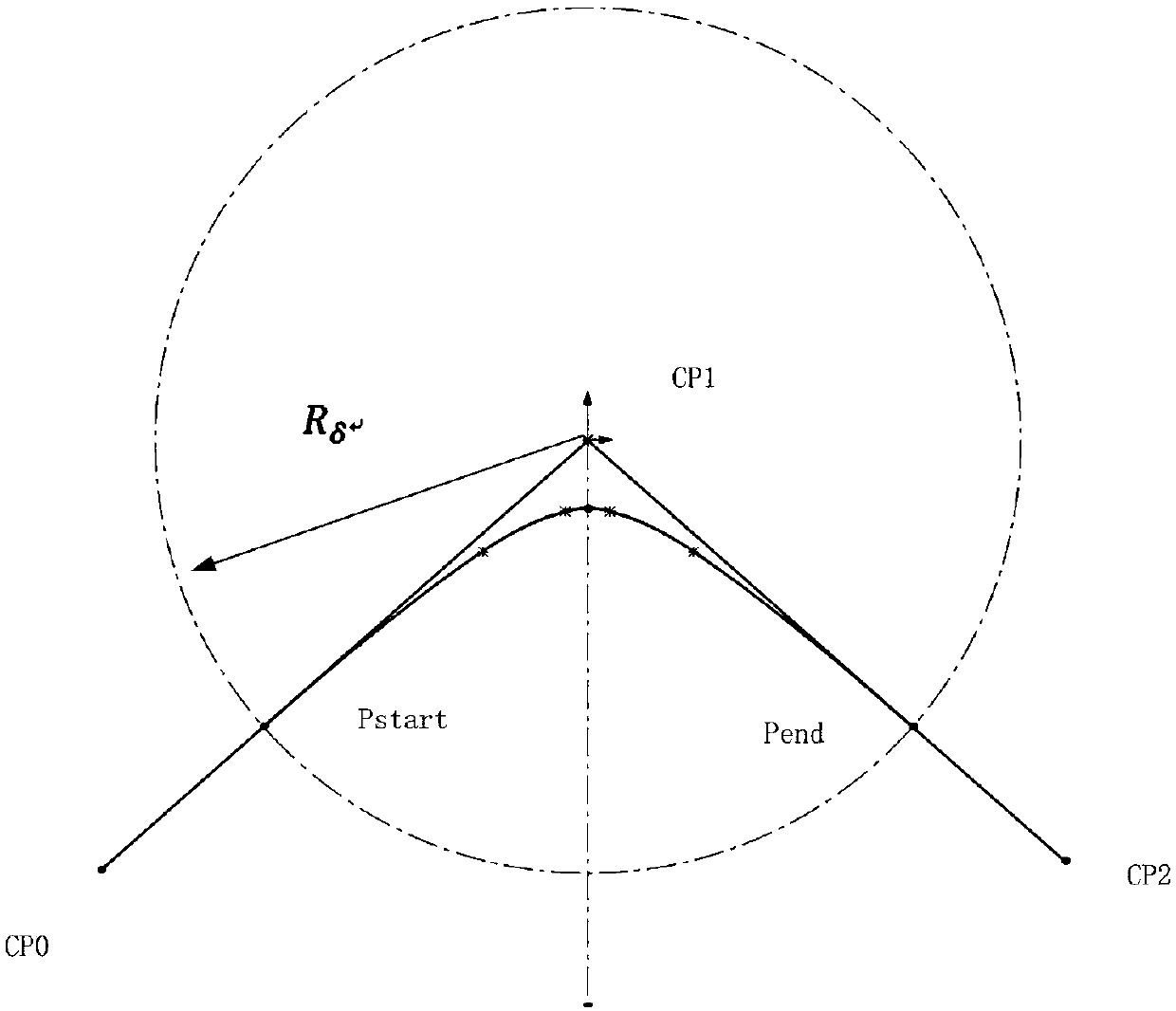
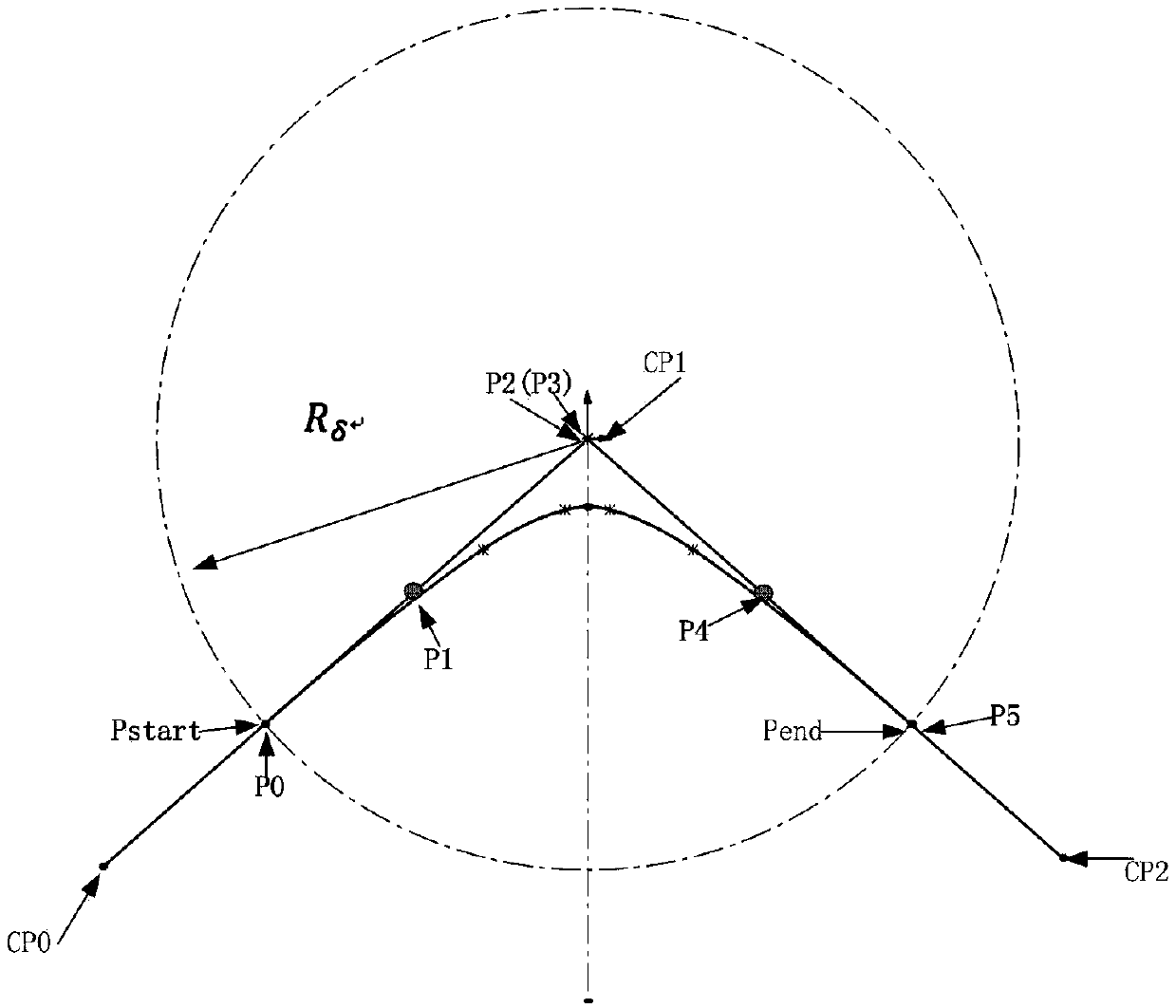
[0041] Step S2: Read the robot motion command and command parameters, the motion command indicates two continuous straight-line motion trajectories, and the command parameters include the transition accuracy R δ , the transition precision represents the precision value of the transition curve of the two linear motion trajectorie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More