

A method and system for detecting ground obstacles based on laser radar
A lidar and obstacle technology, applied in radio wave measurement systems, measurement devices, electromagnetic wave re-radiation and other directions, can solve the problems of large amount of calculation data, undetectable obstacle types, slow processing, etc., to achieve accurate data calculation, The effect of fast identification and reduced data processing volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0050] This embodiment provides a method for detecting ground obstacles based on lidar, such as Figure 1 to Figure 4 As shown, the method includes the steps of:
[0051] A method for detecting ground obstacles based on lidar, comprising steps:
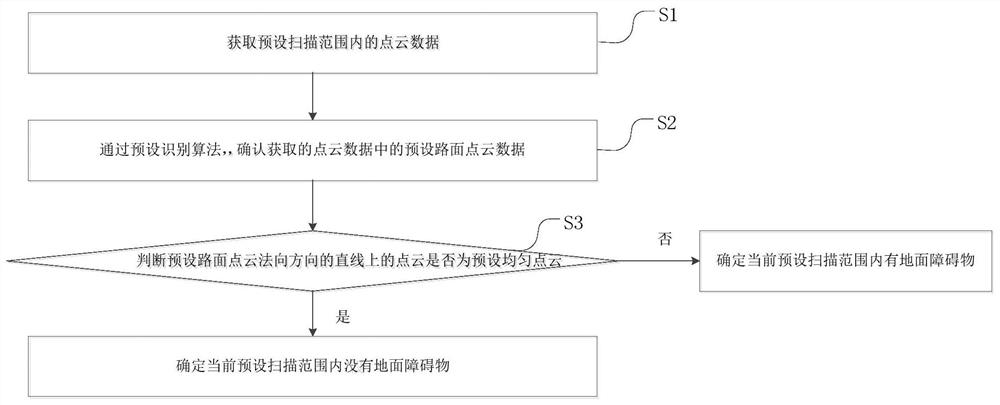
[0052] S1: Obtain point cloud data within the preset scanning range;
[0053] S2: Confirm the preset road surface point cloud data in the obtained point cloud data through the preset recognition algorithm;
[0054] S3: judging whether the point cloud on the straight line in the normal direction of the preset road surface point cloud is a preset uniform point cloud;
[0055] S4: If yes, determine that there is no ground obstacle within the current preset scanning range; if not, determine that there is no ground obstacle within the current preset scanning range.
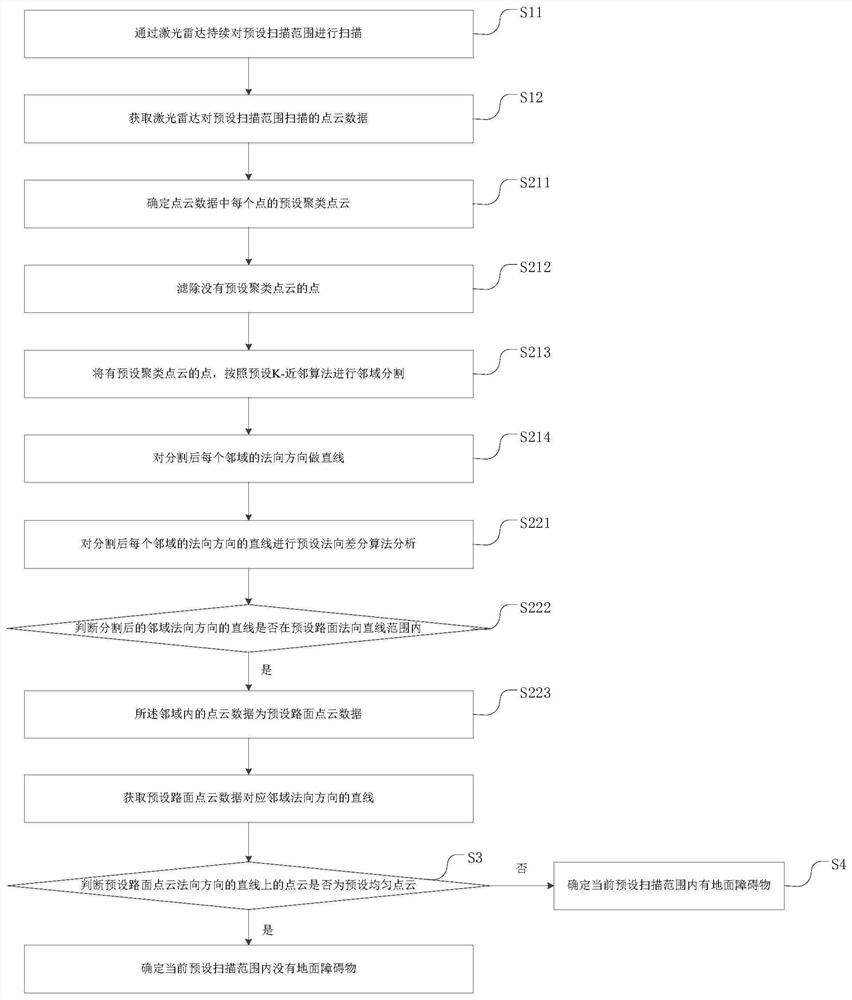
[0056] Further, step S1 includes:
[0057] S11: Continuously scan the preset scanning range through the laser radar;
[0058] S12: Obtain the point cloud data scanned by ...
Embodiment 2
[0086] This embodiment provides a system for detecting ground obstacles based on laser radar, such as Figure 5 to Figure 6 As shown, the system includes:
[0087] Scanning system for obtaining point cloud data within the preset scanning range;
[0088] The control system is used to confirm the preset road surface point cloud data in the obtained point cloud data through a preset recognition algorithm; and judge whether the point cloud on the straight line in the normal direction of the preset road surface point cloud is a preset uniform point cloud; If yes, it is determined that there is no ground obstacle within the current preset scanning range; if not, it is determined that there is no ground obstacle within the current preset scanning range.
[0089] Further, the scanning system includes:
[0090] LiDAR, used to scan the point cloud data within the preset scanning range through the LiDAR of the preset origin;
[0091] The transmission module is used to transmit the poi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More