

A gesture recognition control method for controlling analog quantities
A gesture recognition and control simulation technology, which is applied in character and pattern recognition, three-dimensional object recognition, user/computer interaction input/output, etc., can solve problems such as gesture coupling, and achieve the effect of analog quantity control and discontinuity elimination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
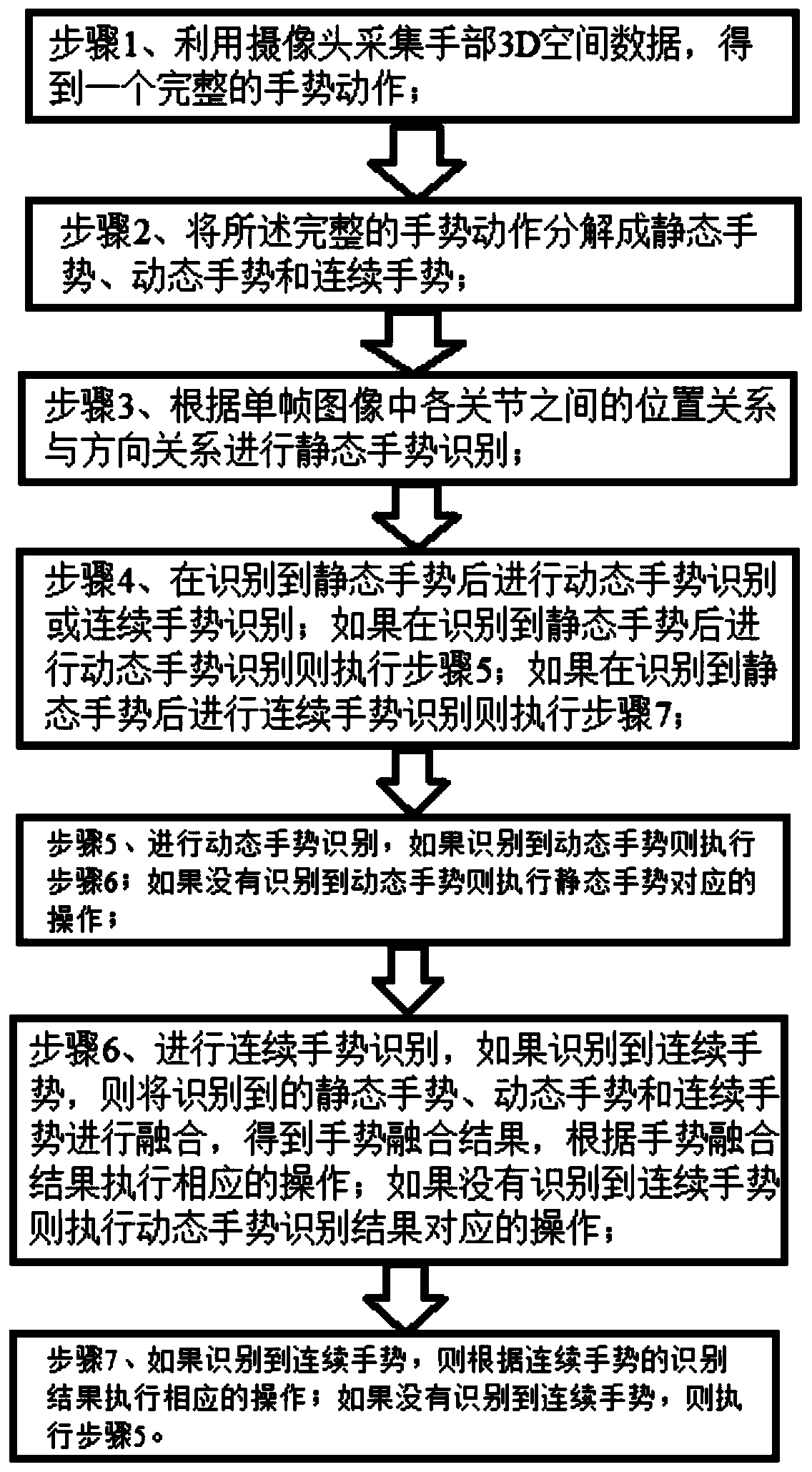
[0022] Such as figure 1 As shown, the present invention proposes a gesture recognition control method for controlling an analog quantity,
[0023] Step 1. Use the camera to collect 3D spatial data of the hand to obtain a complete gesture action;
[0024] Step 2. Decompose the complete gesture action into static gestures, dynamic gestures and continuous gestures;
[0025] Step 3. Perform static gesture recognition according to the positional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More