

Transportation robot capable of climbing stairs
A robot and stair-climbing technology, which is applied in the field of transportation robots, can solve the time-consuming and labor-intensive problems of manually carrying heavy objects up the stairs, and achieve the effect of reducing the handling intensity, reducing overturning, and ensuring the quality of the drive
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
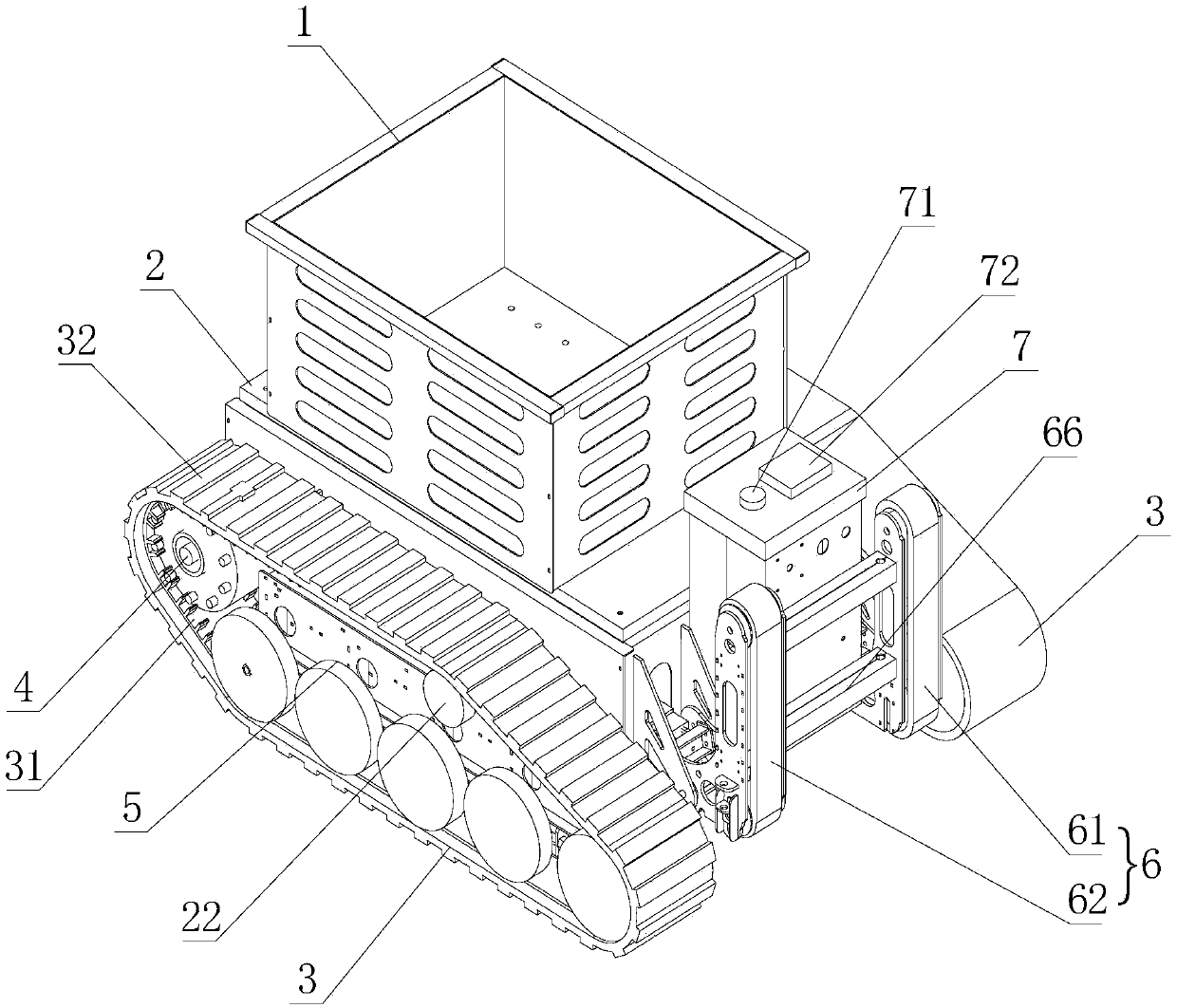
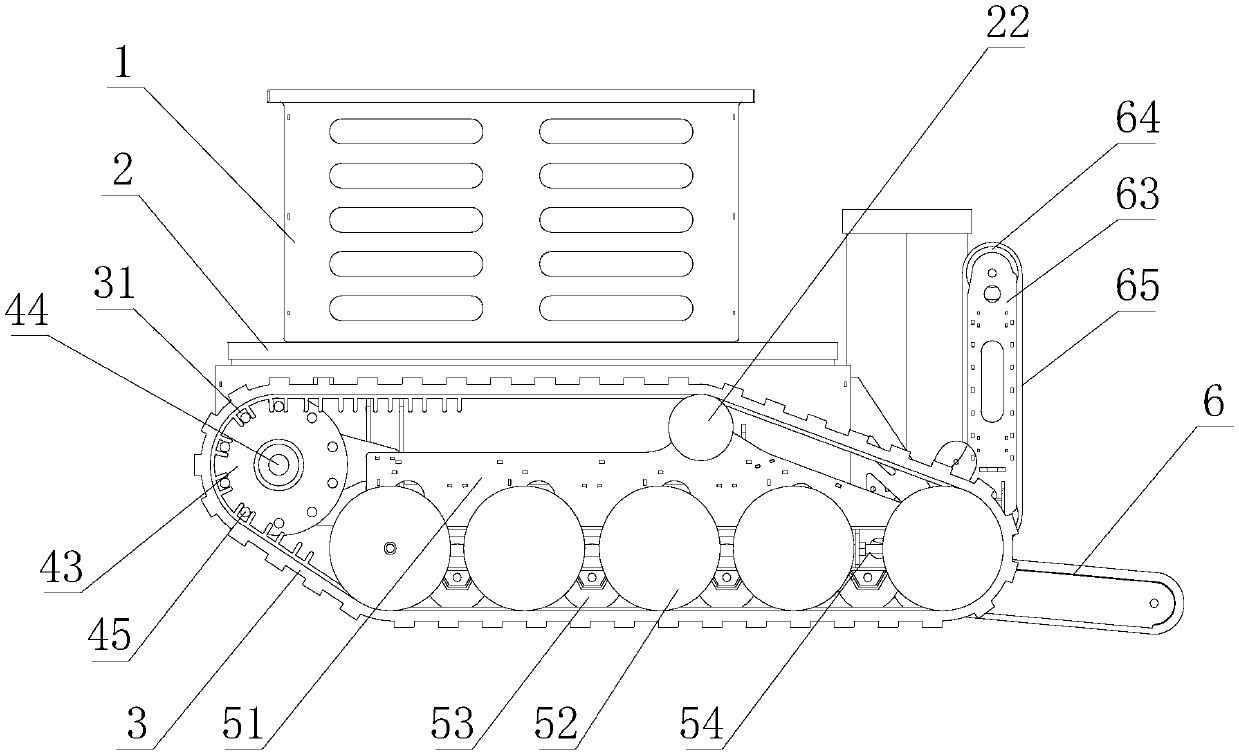
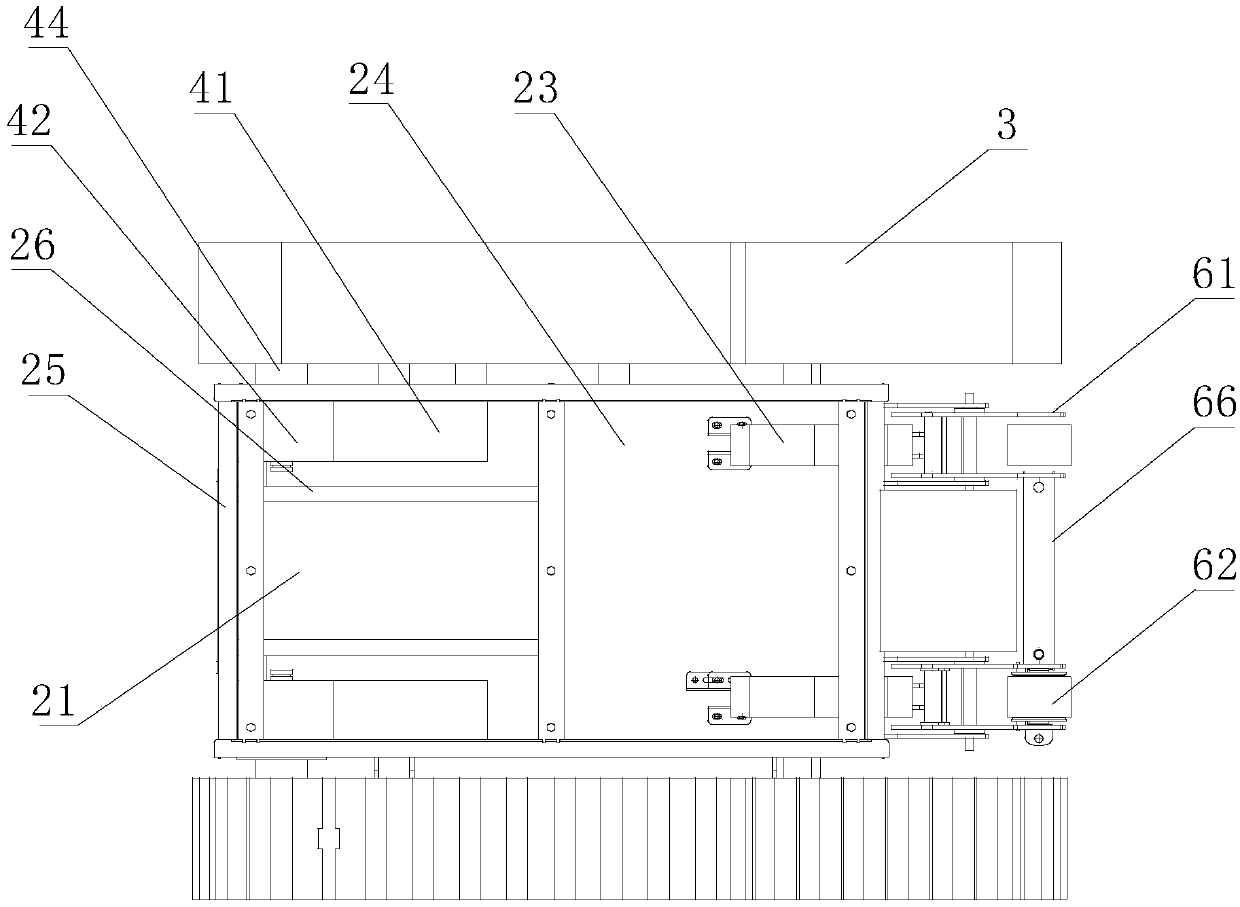
[0029] Such as figure 1 , figure 2 , image 3 As shown, a transport robot capable of climbing stairs includes a storage box 1, a distribution box 2 and a running crawler 3, and there are two running crawlers 3, and the two running crawlers 3 are arranged on the left and right sides of the distribution box 2 , the power distribution box 2 is provided with two groups of driving mechanisms 4, when working, the turning of the transport robot can be controlled by the simultaneous movement of the two groups of driving mechanisms 4, or the movement at different times, or the different directions of rotation. When the driving mechanism 4 is working and the other group of driving mechanisms 4 is not working, the transportation robot can turn in situ. The storage box 1 is arranged on the distribution box 2. The driving mechanism 4, the support mechanism 5 fixedly connected to the distribution box 2, and the balance auxiliary mechanism 6 rotatably connected to the distribution box 2, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More