Multi-link type blanking mechanical device with three freedom degrees
A mechanical device with three degrees of activity technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large cumulative error, low dynamic performance, and large motion inertia of the arm, and achieve no cumulative error, good dynamic performance, The effect of low inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
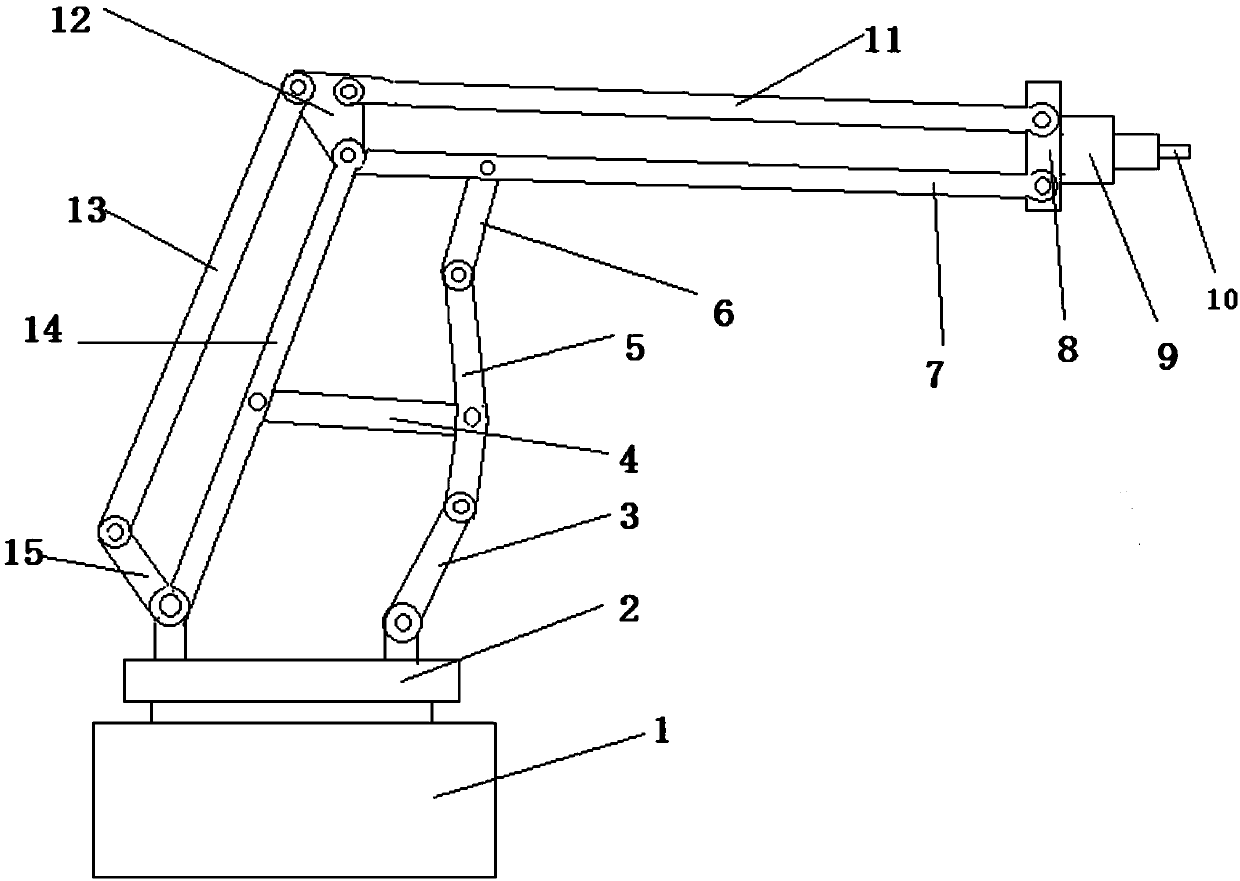
[0006] A multi-rod feeding mechanical device with three degrees of activity, characterized in that it includes a boom connecting rod 13, a connecting plate 12, a small arm connecting rod 11, a wrist connecting rod 8, a big arm 14, a small arm 7, and a small arm Driving rod 3, first connecting rod 5, second connecting rod 6, third connecting rod 4, rotary platform 2, base 1, wrist driving rod 15, wrist 9, torch 10, driving device, one end of the big arm connecting rod 13 Connected to the wrist drive rod 15, the other end of the arm link 13 is connected to the connection plate 12, one end of the forearm link 11 is connected to the link plate 12, the other end of the forearm link 11 is connected to the wrist link 8, and the arm link 11 is connected to the wrist link 8. 14, one end is connected to the rotary platform 2, the other end of the big arm 14 is connected with the connecting plate 12 and one end of the small arm 7, the other end of the small arm 7 is connected to the wrist...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap