Polarized light orientation method of unmanned plane under cloudy conditions
A polarized light, machine cloudy technology, applied in computer parts, instruments, characters and pattern recognition, etc., can solve problems such as reduced accuracy, unsuitable cloudy weather, etc., to improve segmentation accuracy, improve adaptability and positioning measurement accuracy, Use a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
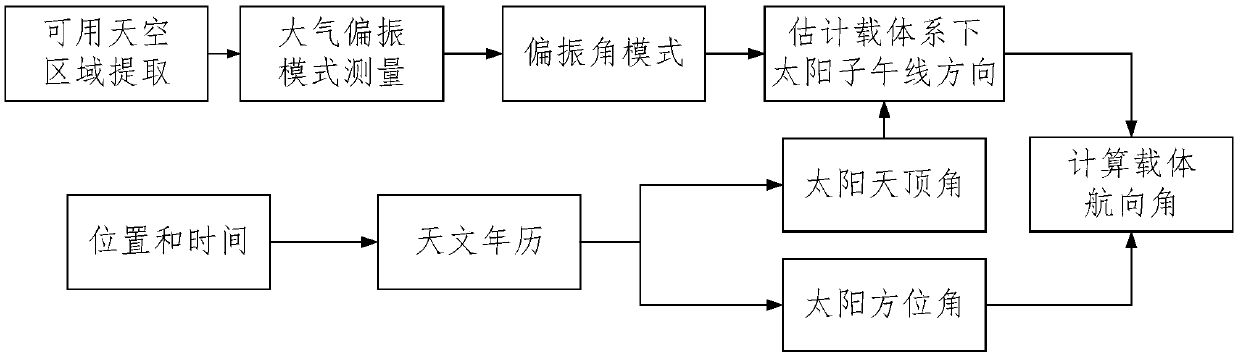
[0031] as attached figure 1 As shown, a polarized light orientation method for unmanned aerial vehicles under cloudy conditions mainly includes the following steps:
[0032] Step 1, extract the most distinguishable color feature from all pixels in the collected image;
[0033] Firstly, the images collected by the UAV camera are processed. There are many of these images, including different viewing angles and different positions. It is necessary to screen the images that are most conducive to the orientation of polarized light. In terms of distinction, images with higher discrimination or recognition can repeatedly reflect the directional characteristics of polarized light. The screening standard is color features. The color features here can be combined and transformed according to color contrast, brightness, and channel parameter values. . In a specific embodiment of the present invention, the most distinguishable color features are extracted according to different color ch...
Embodiment 2
[0123] The embodiment of the present invention also provides a polarized light orientation system under the cloudy condition of the drone, including a processor and a memory, the memory stores a polarized light orientation program under the cloudy condition of the drone, and the processor is running the drone The steps in any of the above embodiments of the polarized light directional method are executed during the polarized light directional program under cloudy conditions.
Embodiment 3
[0125] An embodiment of the present invention also provides a polarized light sensor, including a polarized light orientation system for an unmanned aerial vehicle under cloudy conditions.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com