

A monocular SLAM initialization method and system based on a wheel type encoder
An initialization method and an encoder technology, which are applied in the wheel encoder-based monocular SLAM initialization method and system field, can solve the problems of large error between the measured value and the real value, multiple measured value deviations, and uncertain scale, etc., to achieve The effects of simplifying calculations, improving positioning accuracy, and improving response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution will be described in detail below with reference to the accompanying drawings.
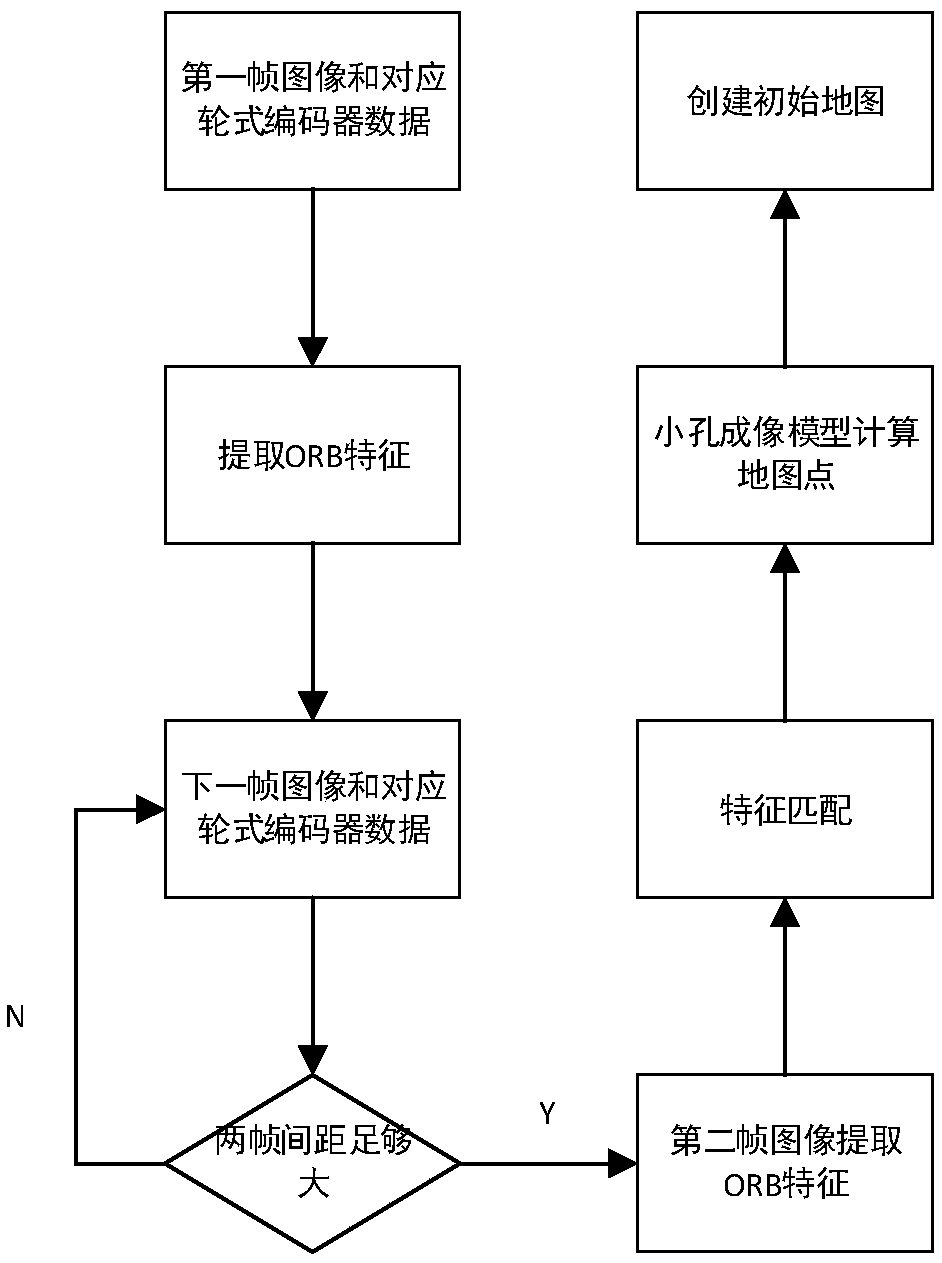
[0035] Such as figure 1 As shown, in this embodiment, a monocular SLAM initialization method and system based on a wheel encoder is applied to a monocular top-view sweeping robot in an indoor environment, and images captured by the camera and displacement data of the wheel encoder are acquired in real time. Extract and match ORB features for two frames of images with a sufficiently large distance, and use the camera pinhole imaging model to calculate a series of initial map points according to various existing data, and finally construct an initial point cloud map for subsequent use.
[0036]The monocular SLAM initialization system based on a wheel encoder includes a visual sensor, a wheel encoder, and a SLAM module. The visual sensor is used to capture SLAM initialization image sequences and transmit them to the SLAM module; the visual sensor is generally a color cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More