

Cooperative control system and method for catheter and guidewire for vascular intervention operation robot
A technology of interventional surgery and collaborative control, applied in the direction of surgical robots, etc., can solve problems that do not conform to the doctor's operating habits, limit the doctor's sense of presence, and guide wire advancement errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
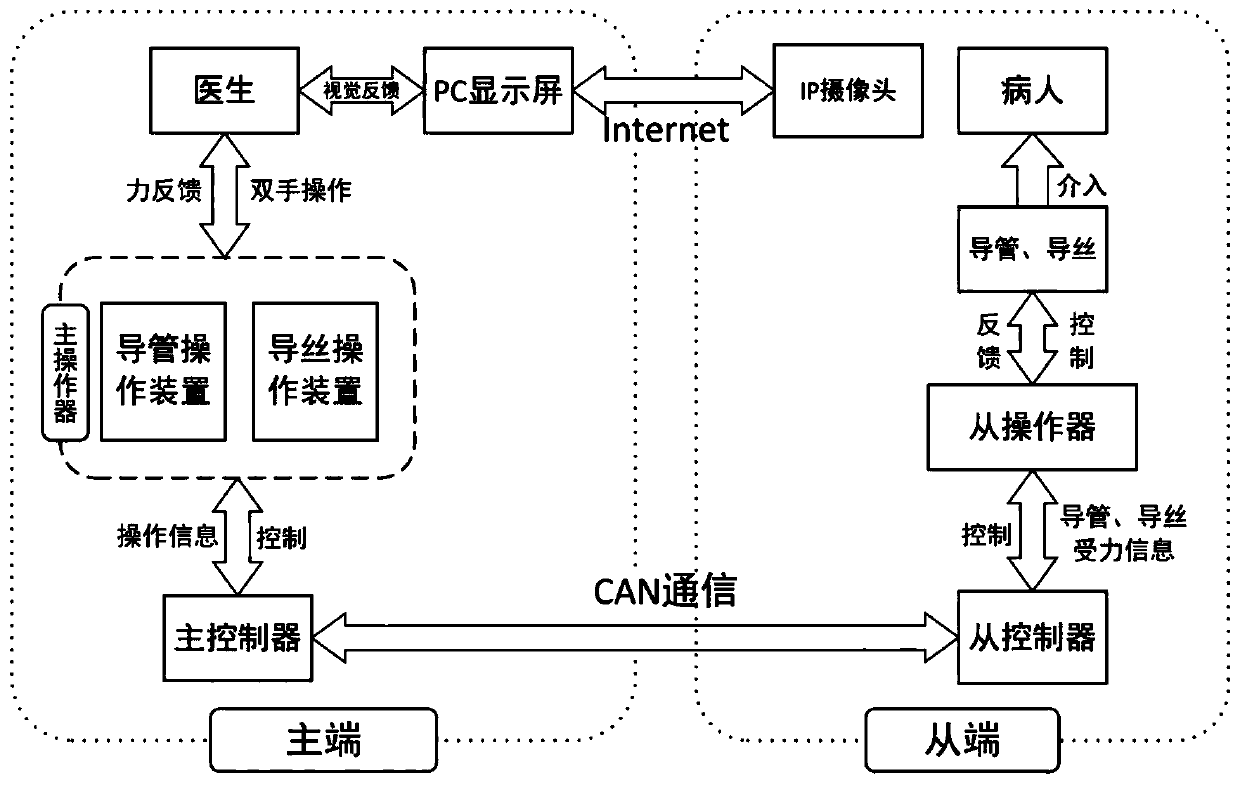
[0112] Embodiment: a kind of vascular interventional surgery robotic catheter guide wire cooperative control system, such as figure 1 As shown, it is characterized in that it includes a master terminal system and a slave terminal system, which can simultaneously control catheters and guide wires to perform cooperative operations; wherein, the master terminal system is composed of a master operator, a master controller and a PC display screen; the The main manipulator is composed of a catheter operating device and a guide wire operating device, and is used to realize the operation of the catheter and guide wire; the catheter operating device and the guide wire operating device are controlled and operated by the doctor's left and right hands respectively, and the input terminal receives the doctor's The operation signal of both hands and the control signal of the main controller, the output end of which is connected to the main controller, and the operation information is sent to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More