

A sins/usbl phase difference tight integrated navigation and positioning method based on double transponders
A technology of navigation positioning and transponder, which is applied in the direction of navigation, positioning, and instruments through speed/acceleration measurement. problems, to avoid coordinate conversion errors, improve system positioning accuracy, and eliminate hydrophone clock errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
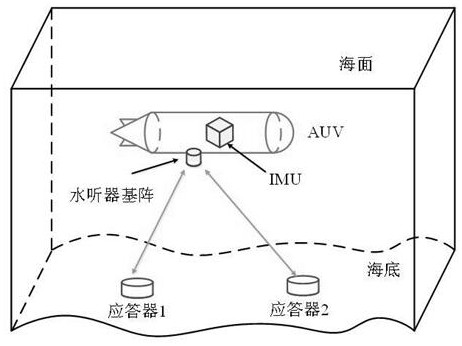
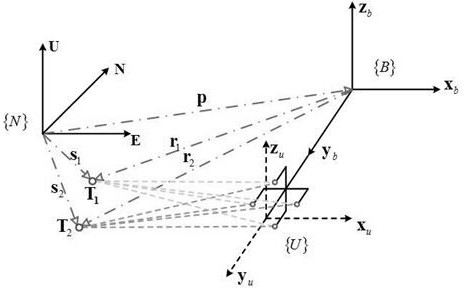
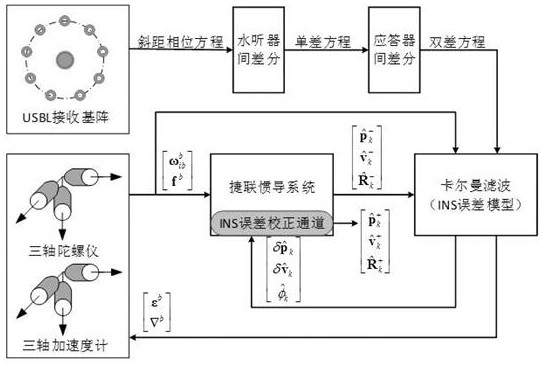
[0062] The present invention is a dual-transponder-based SINS / USBL phase-difference-tight combined navigation and positioning method. The method solves the problem of the error accumulation of the strapdown inertial navigation system over time. On the one hand, the double-difference processing method can effectively offset the ultra-short baseline positioning system. On the other hand, the ultra-short baseline phase difference is used as the observation quantity for tight combination, which avoids the coordinate conversion error and matrix offset error caused by the USBL directly solving the position, and can effectively improve the performance of the AUV integrated navigation and positioning system. precision.
[0063] like figure 1 As shown, the present invention consists of a strapdown inertial navigation system (SINS) and an ultra-short baseline positioning system (USBL) installed on the AUV, wherein the hydrophone receiving array of the ultra-short baseline system and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More