

A visual navigation and positioning method for AGV based on a new coded mark
A technology of encoding marks and positioning methods, applied in two-dimensional position/channel control, controllers with specific characteristics, electric controllers, etc., can solve problems such as easy blurring of images, low sorting error rate, and high price. Achieve fast and accurate analysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0105] This embodiment discloses an AGV visual navigation and positioning method based on a novel coding mark, which is used to improve the efficiency of AGV navigation and positioning. The method includes the following two parts:
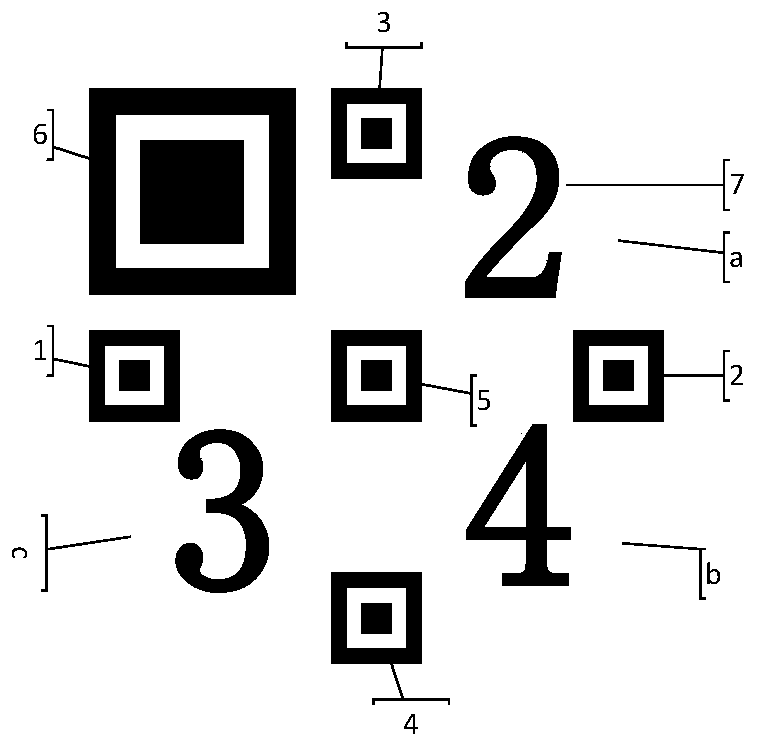
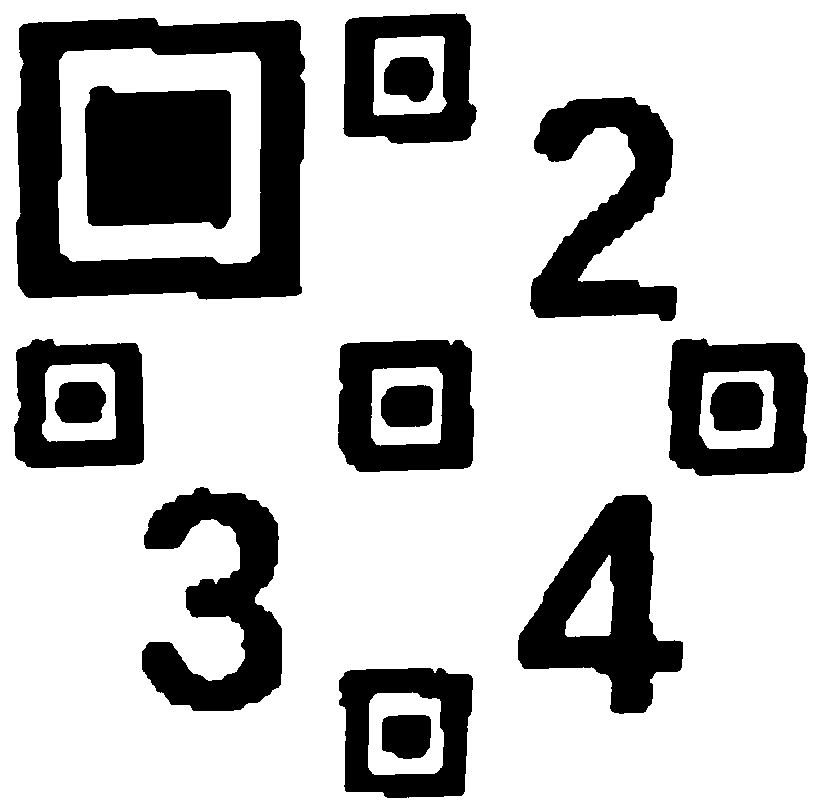
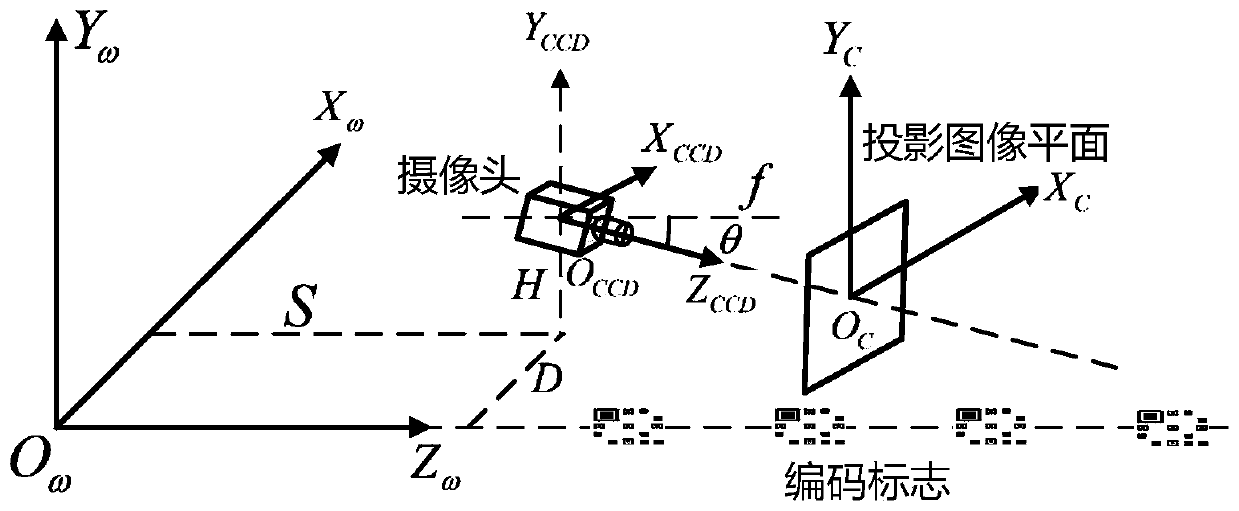
[0106] 1. Design of a new type of coding sign and visual system: First, according to the characteristics of the AGV walking path, a new type of digitally coded two-dimensional code sign is designed, which includes positioning function, navigation function, and digital information coding function to ensure that the image is blurred. It can be quickly and accurately identified; secondly, according to the characteristics of the AGV's two action modes of going straight and right-angle turning, and the requirement to obtain the road surface information ahead of time, the AGV vision system model is designed to ensure that the AGV can quickly identify the coded signs, and at the same time, it can be used in the computer coordinate system and the computer co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More