

A lane line detection algorithm based on an instance segmentation neural network framework
A lane line detection and neural network technology, applied in the field of lane line detection algorithm based on instance segmentation neural network framework, can solve problems such as robustness and lane line pixel projection, and achieve wide application range, high robustness, and high efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
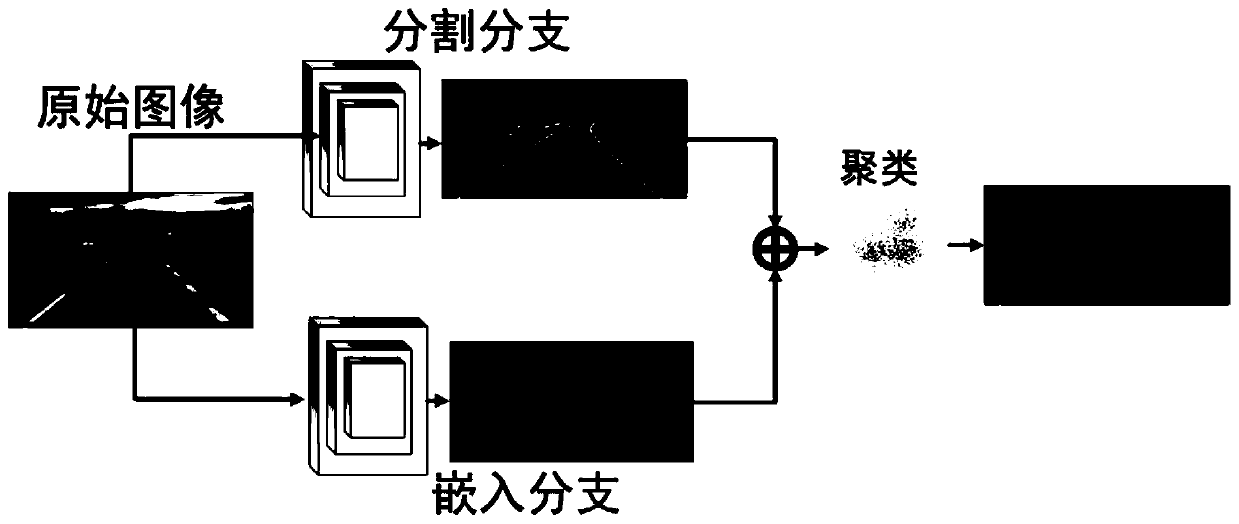
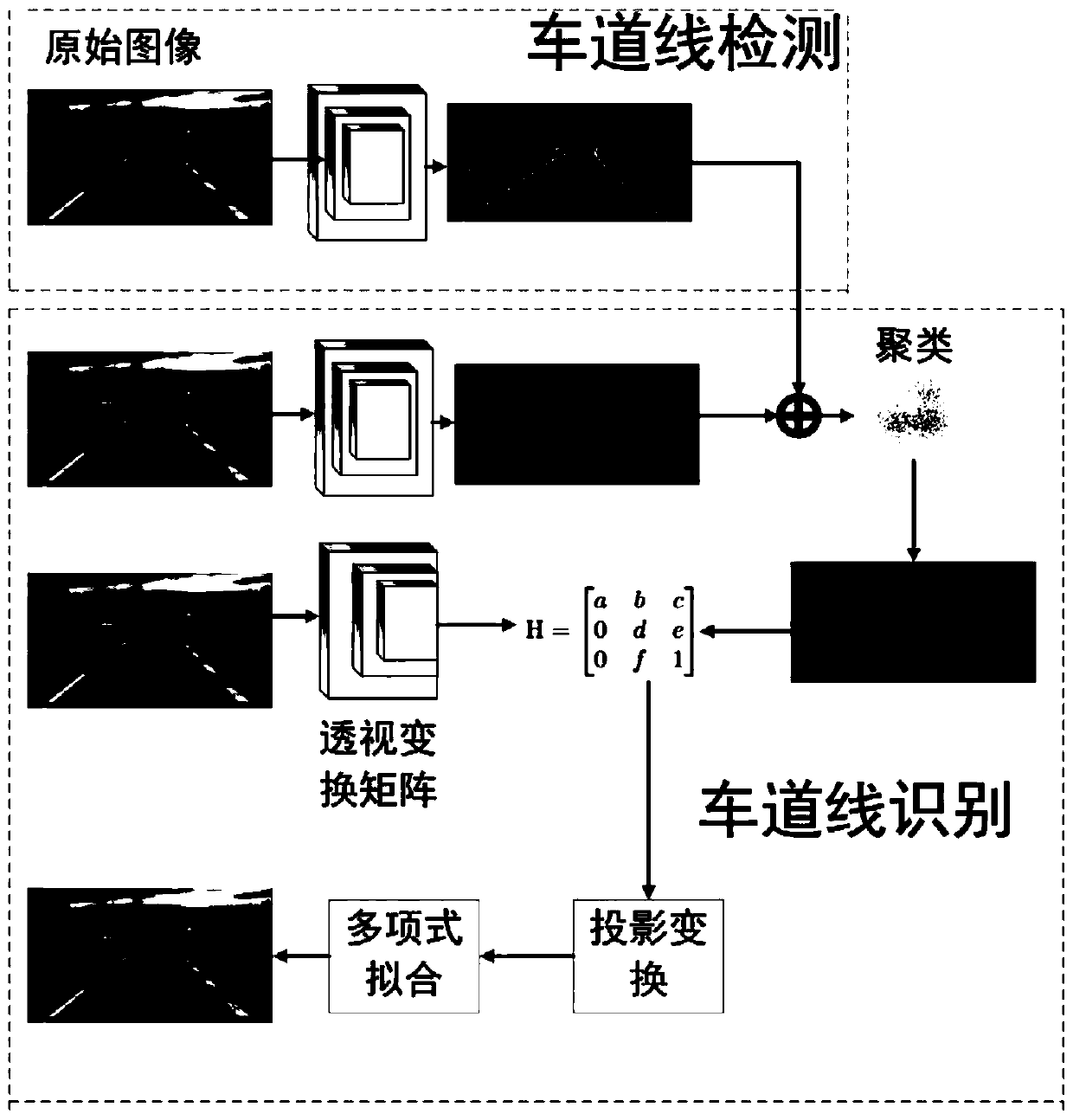
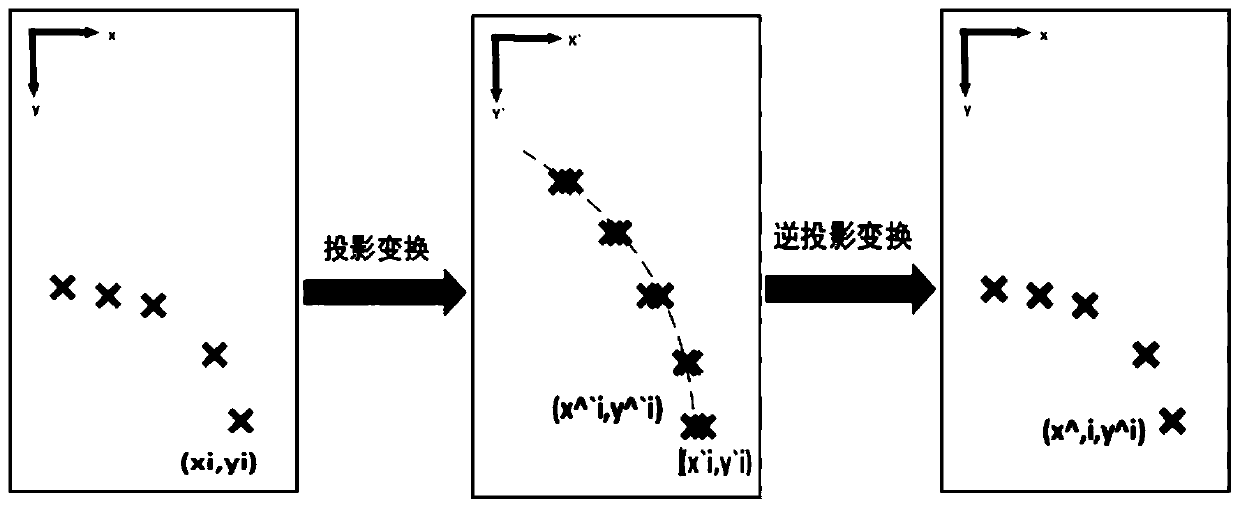
[0050] Such as figure 1 As shown, the present invention establishes a lane line detection model of an instance segmentation network and a projection matrix transformation network, which can be divided into an instance segmentation algorithm and a projection fitting algorithm according to the algorithm division, wherein the instance segmentation algorithm is as follows figure 2 As shown, the instance segmentation part includes binary segmentation and vector embedding. After pixel clustering, the lane line is finally obtained. The entire detection module is the language instance segmentation module. After being processed by the instance segmentation neural network, several pixels will be selected longitudinally from the lane line instance and projected into the bird's-eye view as shown in image 3 As shown in the part from the left to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More