

A depth information acquisition system based on a dual-structure light RGB-D camera
A depth information and acquisition system technology, applied in the field of 3D vision, can solve the problems of poor depth image quality, high price, and no potential for general application, and achieve the effect of improving quality, ensuring real-time performance and efficiency, and high real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
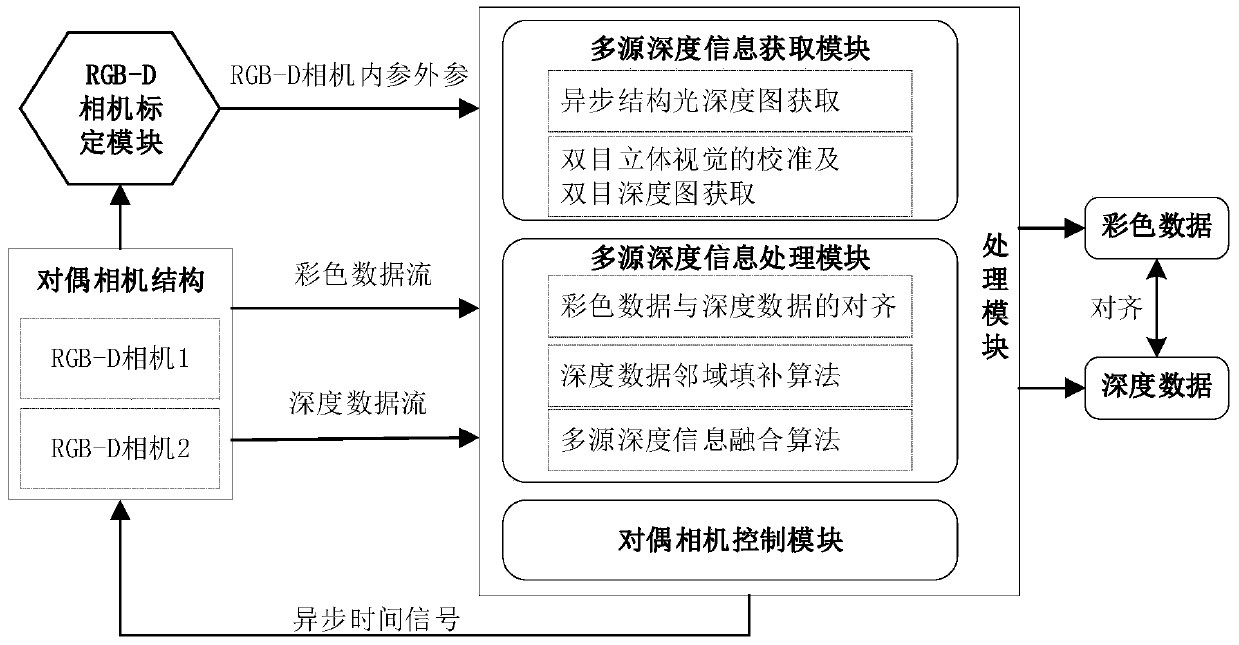
[0057] The present invention designs a dual RGB-D camera system, and designs a corresponding calibration algorithm, depth information filling algorithm and fusion algorithm, which overcomes the lack or existence of depth information in existing consumer-grade RGB-D cameras. To solve the problem of voids, obtain dense and flat high-quality depth information, form a low-cost and high-quality depth information acquisition system, and provide a high-quality three-dimensional data source for 3D machine vision systems. The whole system includes the following components: (1) Dual structured light RGB-D camera structure: two structured light RGB-D cameras are installed symmetrically at 180 degrees each other (2) RGB-D camera calibration module: use an asymmetric disc calibration plate Calibration of the color camera and depth camera of a single camera RGB-D camera, and the calibration of the homogeneous relationship between the two sub-camera color cameras; (3) Multi-source depth infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More