

Calibration method, device and system for a pipeline measuring robot
A technology for measuring robots and calibration methods, which is applied in the calibration field of pipeline three-dimensional measurement robots, can solve problems such as difficult calibration of three-dimensional attitude deviation, and achieve the effect of reducing friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
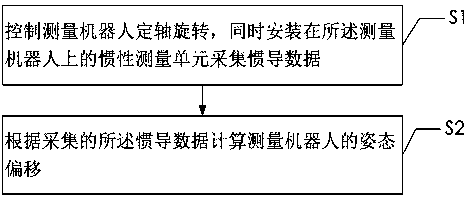
[0038] The first embodiment provided by the present invention is a calibration method for a pipeline measuring robot, such as figure 1 As shown, the calibration method includes:
[0039] Step S1. Control the measuring robot to rotate with a fixed axis, and at the same time, the inertial measurement unit installed on the measuring robot collects inertial navigation data.
[0040] In this step, the measuring robot is erected on the calibration device, and the measuring robot is controlled to rotate with a fixed axis. The calibration device used in this step can be a device capable of elevating the pipeline measurement robot, and the device can only have a support for the measurement robot, and a base for fixing the support, or it can be a device with two fixed The stand realizes the means for elevating the measuring robot.
[0041] After the measuring robot is elevated, control the measuring robot to rotate with a fixed axis. Since an inertial measurement unit is installed in...
Embodiment 2
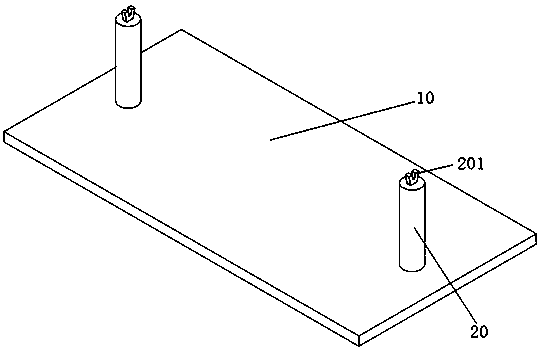
[0085] The second embodiment provided by the present invention is a calibration device for a pipeline measuring robot, such as image 3 As shown, it is used to measure and calibrate the measuring robot, combined with Figure 4 , the measurement robot includes: an electronic warehouse 301 with an inertial measurement unit installed inside, a sliding bar 303 symmetrically arranged on both sides of the electronic warehouse 301, and a walking wheel 302 evenly arranged on the sliding bar 303;
[0086] The calibration device includes:
[0087] A base 10, a bracket 20 arranged on the base 10;
[0088] The bracket includes: a left bracket and a right bracket;
[0089] The upper ends of the left bracket and the right bracket are both provided with a V-shaped bracket 201 , one end of the slide bar 303 is connected to the center of both sides of the electronic compartment, and the other end is erected on the V-shaped bracket 201 .
[0090] Optionally, the structures of the left bracke...
Embodiment 3
[0095] The third embodiment provided by the present invention is a calibration system for a pipeline measuring robot, which combines image 3 and Figure 4 As shown, the system includes: a pipeline measurement robot and a calibration device;
[0096]The measuring robot includes: the measuring robot includes: an electronic cabin with an inertial measurement unit installed inside, sliding bars symmetrically arranged on both sides of the electronic box, and walking wheels evenly arranged on the sliding bars;
[0097] The calibration device includes: a base, a bracket arranged on the base;
[0098] The bracket includes: a left bracket and a right bracket;
[0099] The upper ends of the left bracket and the right bracket are both provided with V-shaped brackets, one end of the slide bar is connected to the center of both sides of the electronic warehouse, and the other end is erected on the V-shaped bracket.
[0100] Preferably, the left bracket and the right bracket are arrange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More