

A sensor external parameter calibration method and system
A sensor coordinate system and external parameter technology, which is applied in the external parameter calibration method and system field of the sensor, can solve the problems of cumbersome calibration operation and low efficiency, and achieve the effect of high calibration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
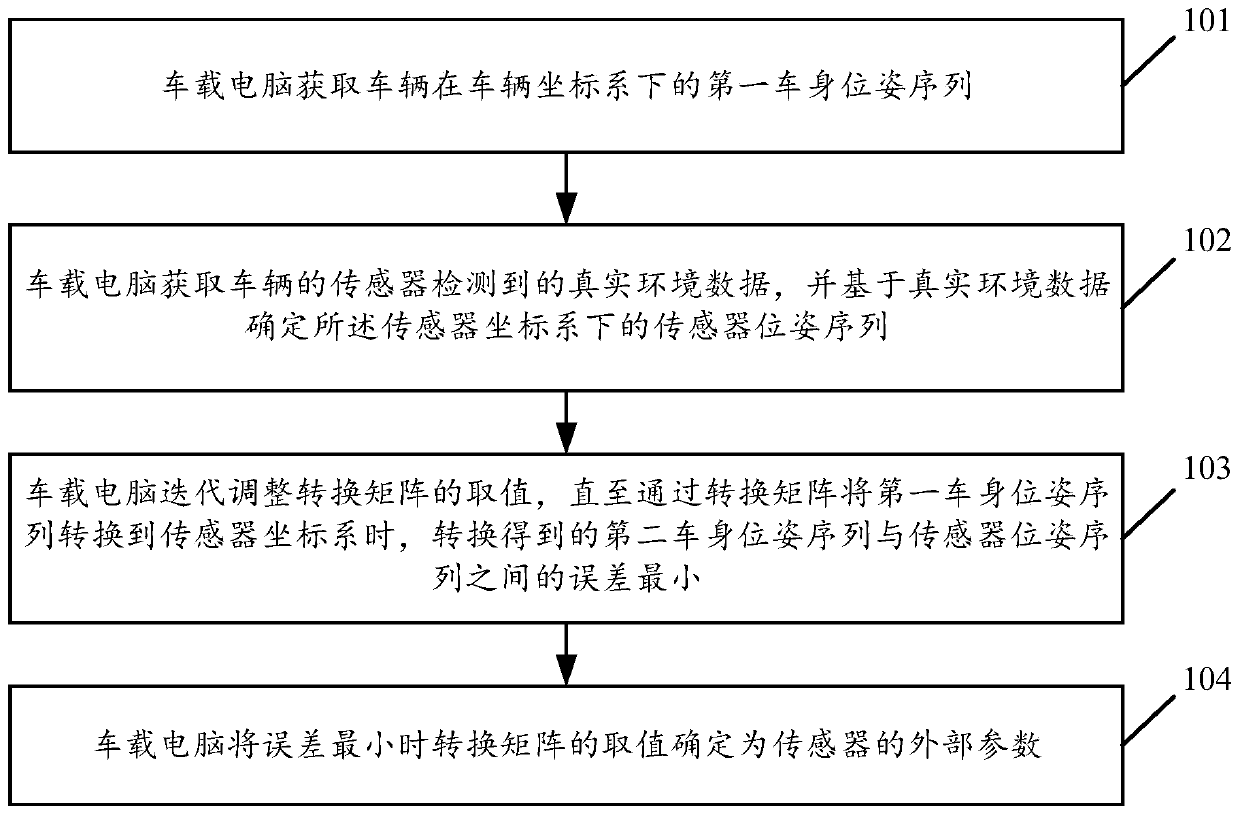
[0056] see figure 1 , figure 1 It is a schematic flowchart of a sensor external parameter calibration method disclosed in an embodiment of the present invention. The method can be applied to equipment such as a vehicle-mounted industrial control computer, a vehicle-mounted computer, a personal computer, and a calibration system server. The method for calibrating the external parameters of the sensor disclosed in the embodiment of the present invention is described below by taking the on-board computer as an example, which should not be construed as a limitation to the method. Such as figure 1 As shown, the external parameter calibration method of the sensor may include the following steps:
[0057] 101. The on-board computer acquires the first body pose sequence of the vehicle in the vehicle coordinate system.
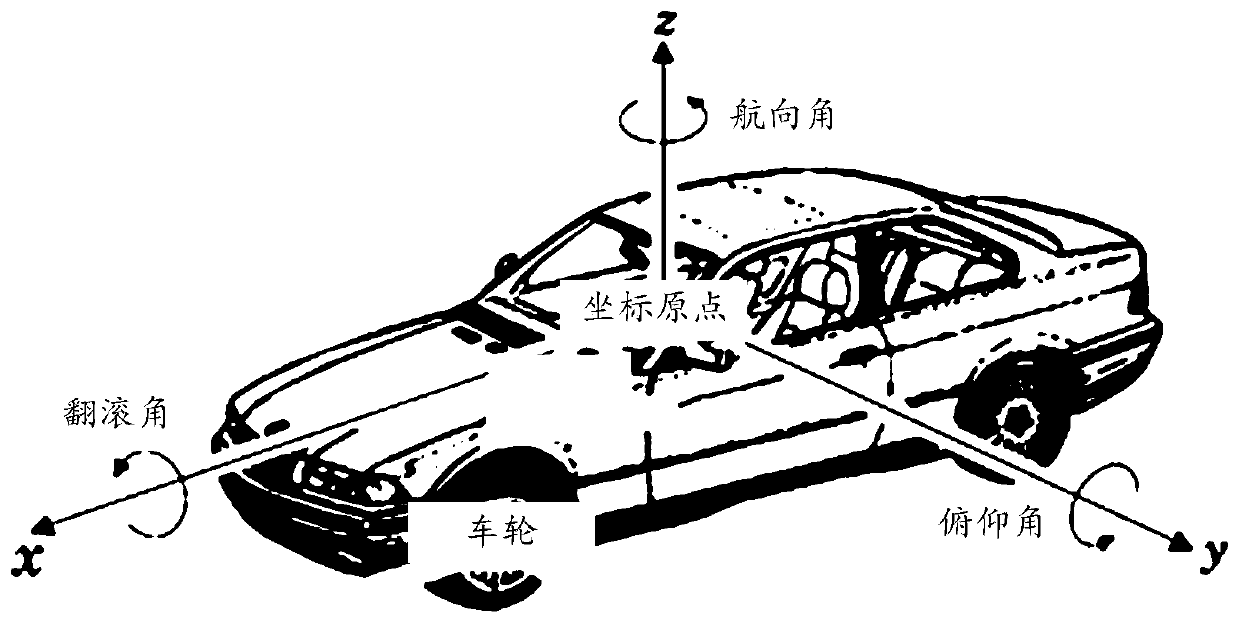
[0058] In the embodiment of the present invention, please refer to figure 2 , figure 2 It is an example diagram of a vehicle coordinate system disclosed in the...
Embodiment 2
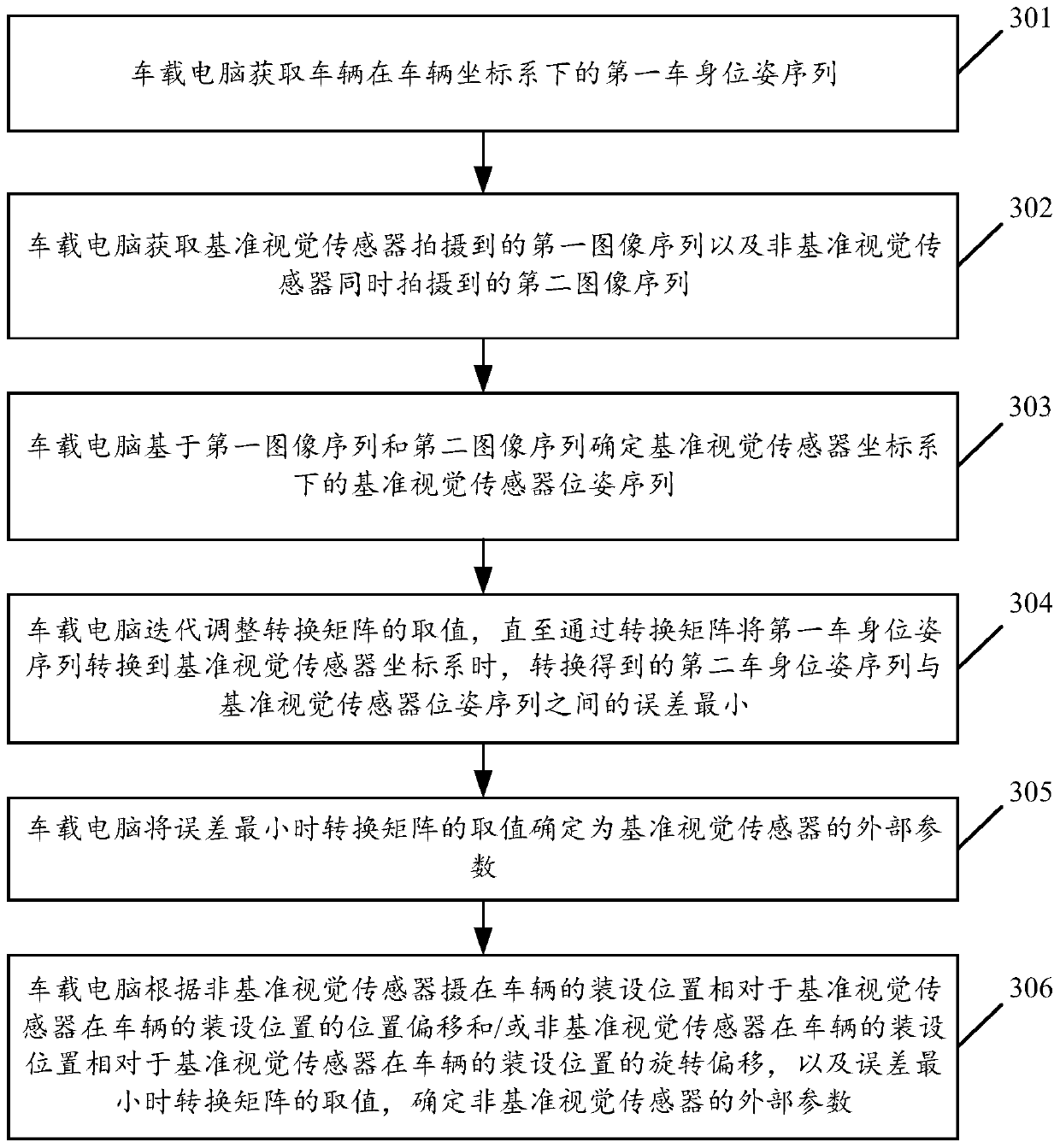
[0079] see image 3 , image 3 It is another external parameter calibration method of the sensor disclosed in the embodiment of the present invention. exist image 3 In the shown method, the sensor is a binocular vision sensor. Such as image 3 As shown, the external parameter calibration method of the sensor includes:
[0080] 301. The on-board computer acquires the first body pose sequence of the vehicle in the vehicle coordinate system.
[0081] 302. The on-board computer acquires the first image sequence captured by the reference visual sensor and the second image sequence simultaneously captured by the non-reference visual sensor.
[0082] In the embodiment of the present invention, the reference vision sensor is any one of the binocular vision sensors, and the non-reference vision sensor is another vision sensor of the binocular vision sensors. The image frames contained in the first image sequence and the image frames contained in the second image sequence have a ...
Embodiment 3
[0101] see Figure 4 , Figure 4 It is an external parameter calibration system of a sensor disclosed in the embodiment of the present invention. Such as Figure 4 As shown, the external parameter calibration system may include:
[0102] The first pose acquisition unit 401 is configured to acquire a first body pose sequence in the vehicle coordinate system;
[0103] The second pose acquisition unit 402 is configured to acquire the real environment data detected by the sensor of the vehicle, and determine the sensor pose sequence under the sensor coordinate system based on the real environment data;
[0104] In the embodiment of the present invention, the sensor may be a vision sensor or a laser radar. When the sensor is a vision sensor, the real environment data can be an image sequence captured by the vision sensor; when the sensor is a lidar, the real environment data can be point cloud information detected by the lidar. Wherein, the vision sensor may include a monocula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More