

Linear motor physical precision compensation control system and method
A linear motor, compensation control technology, applied in control system, AC motor control, motor parameter estimation/correction, etc., can solve the problem of physical position deviation, poor physical accuracy, and deviation between the feedback data of the grating scale and the actual position and other issues to achieve precision optimization and improve the effect of displacement control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments.
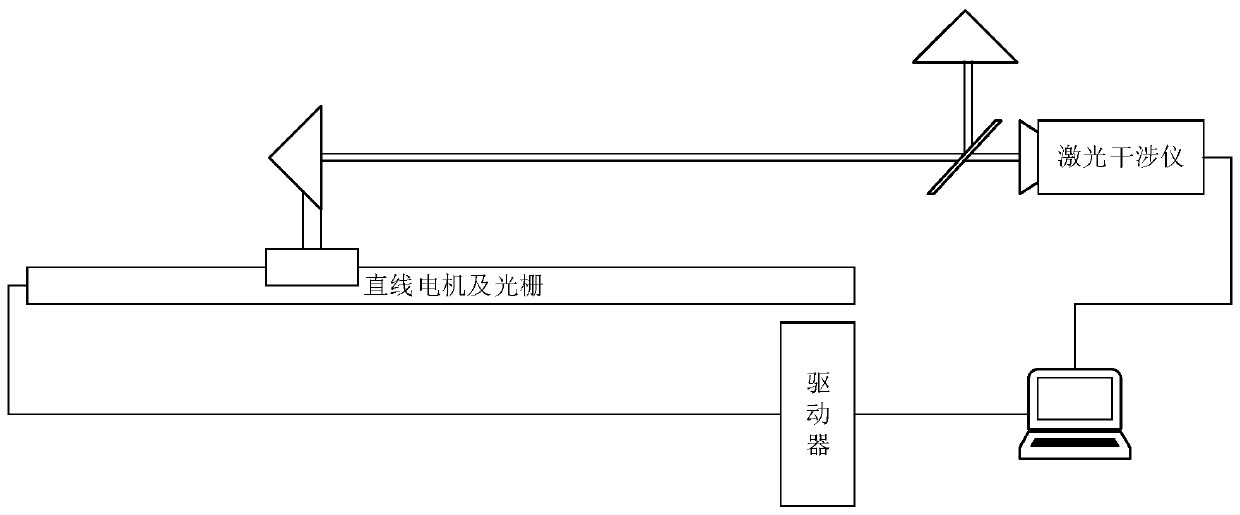
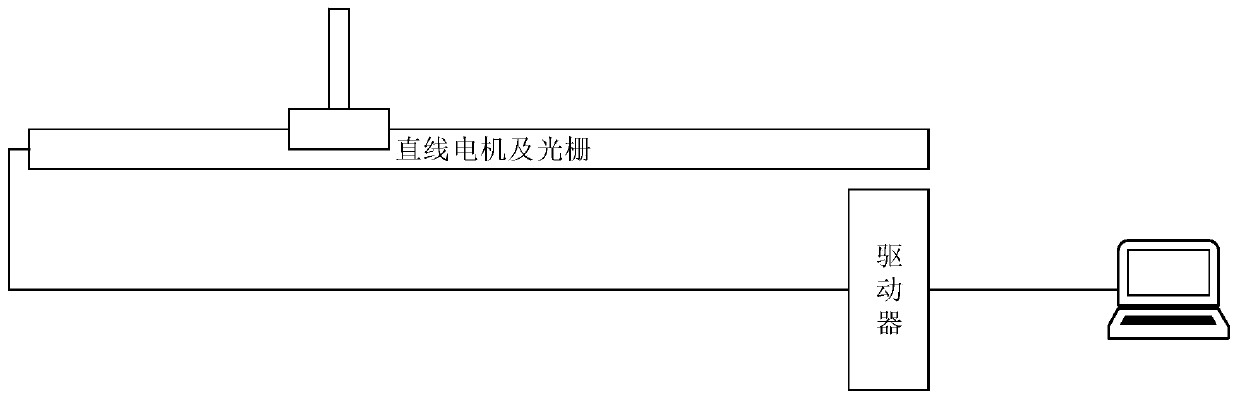
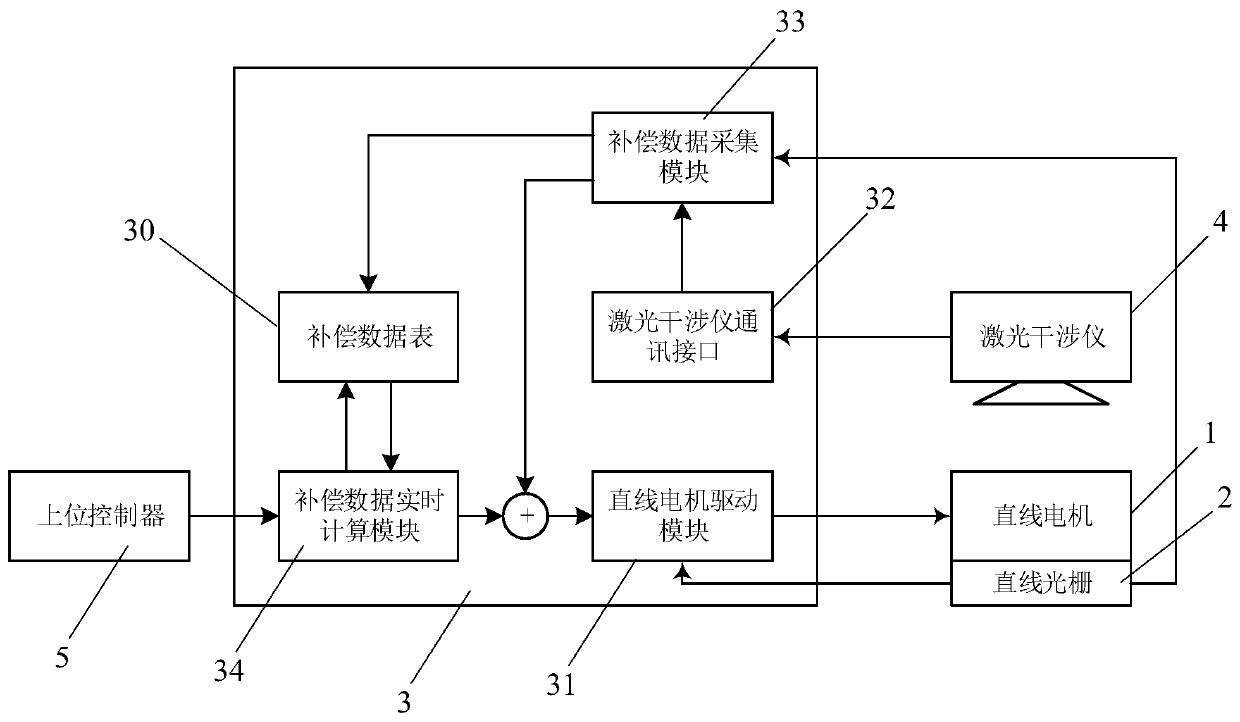
[0024] The invention discloses a linear motor physical precision compensation control system, which combines Figure 1 to Figure 3 As shown, it includes:
[0025] linear motor 1;
[0026] a linear grating ruler 2, used to collect the linear displacement of the linear motor 1;
[0027] Main control unit 3, the linear motor 1 and the linear grating ruler 2 are respectively electrically connected to the main control unit 3, the main control unit 3 is preset with a compensation data table 30, and the moving track of the linear motor 1 is preset There are multiple collection points, and the main control unit 3 is used to execute:
[0028] During the calibration learning process, when the linear motor 1 moves to each collection point, the position data collected by the linear grating scale 2 is fed back to the main control unit 3 and stored in the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More